Robotics-Academy exercises
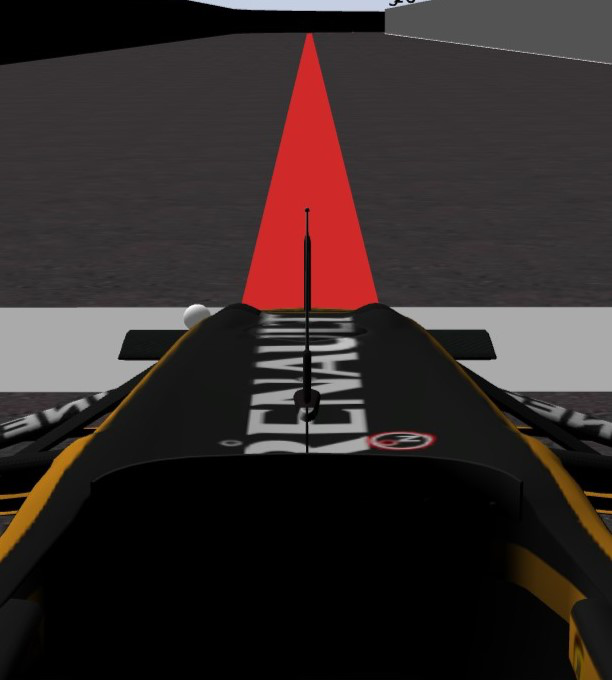
Complete a lap following the line painted on the racing circuit.
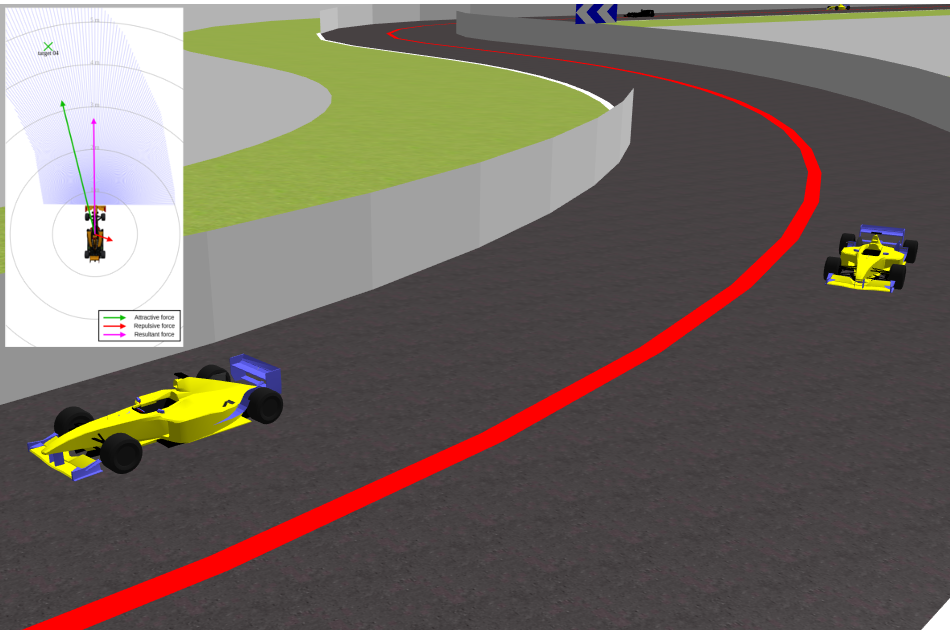
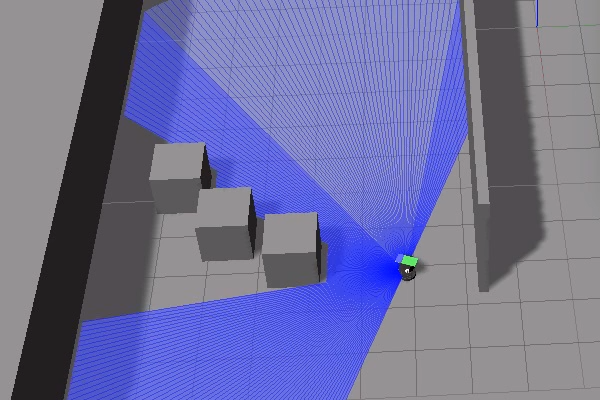
Local navigation. Virtual Force Field navigation algorithm using a F1.
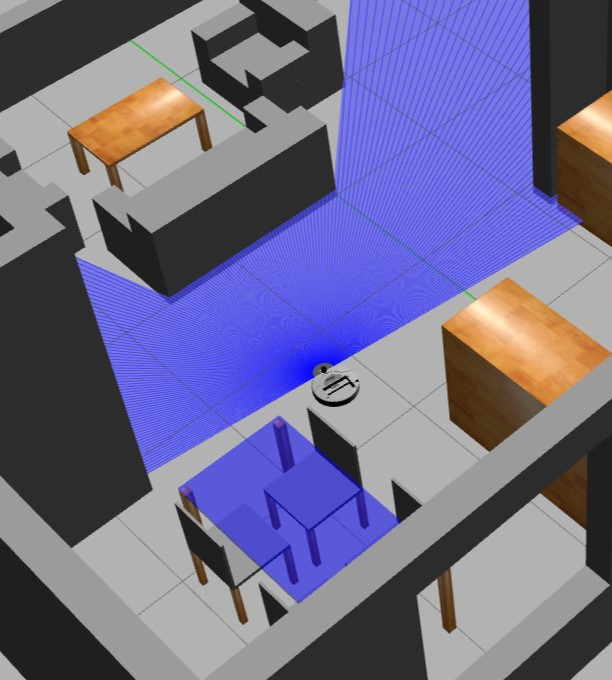
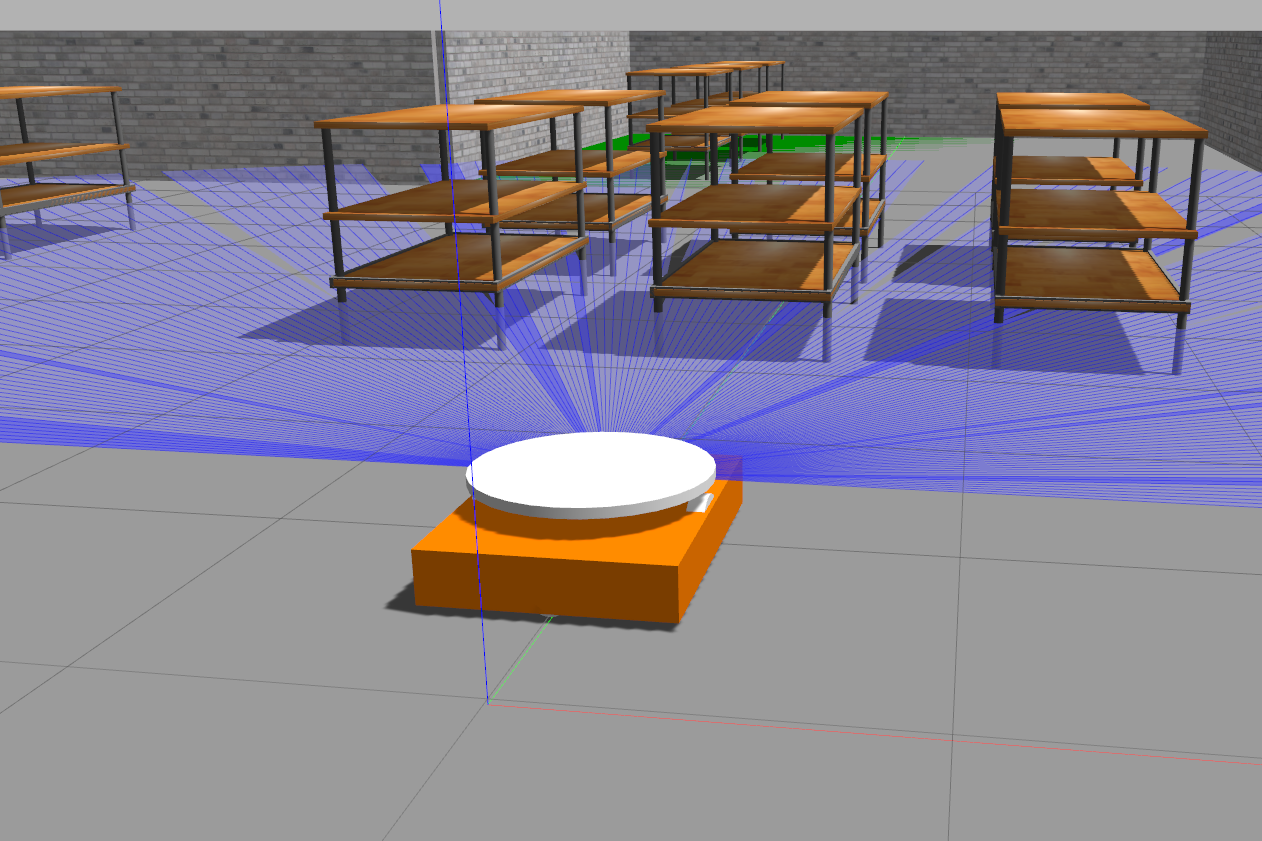
Navigation algorithm for an autonomous vacuum.
Foraging algorithm for an autonomous vacuum with good localization.
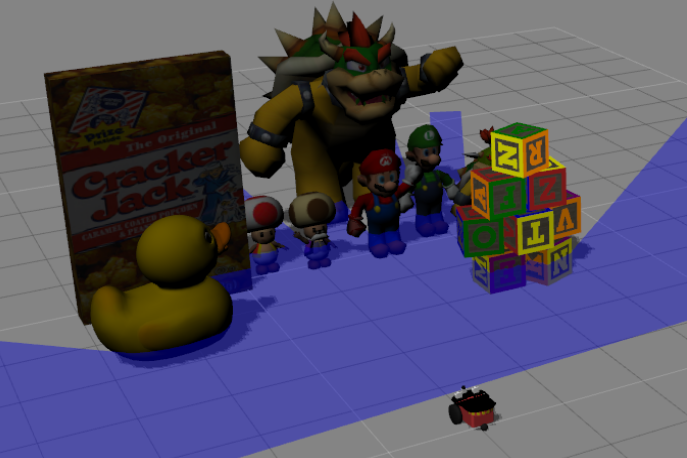
Reconstruct a 3D scene from a stereo pair

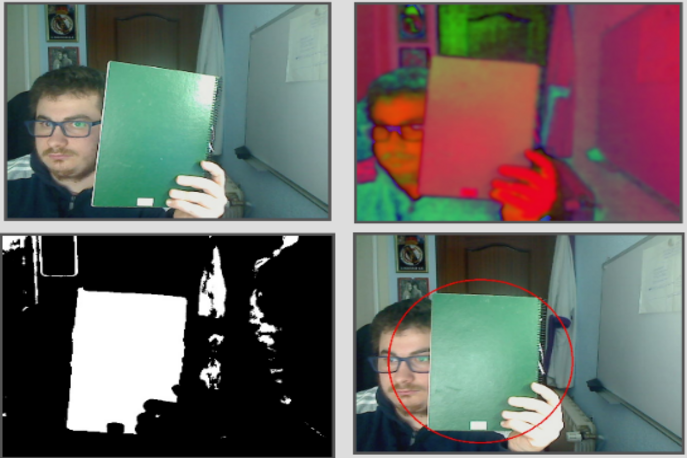
Follow a road through color filter segmentation.
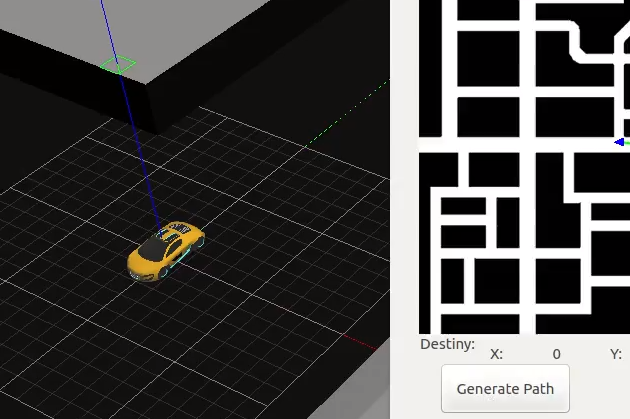
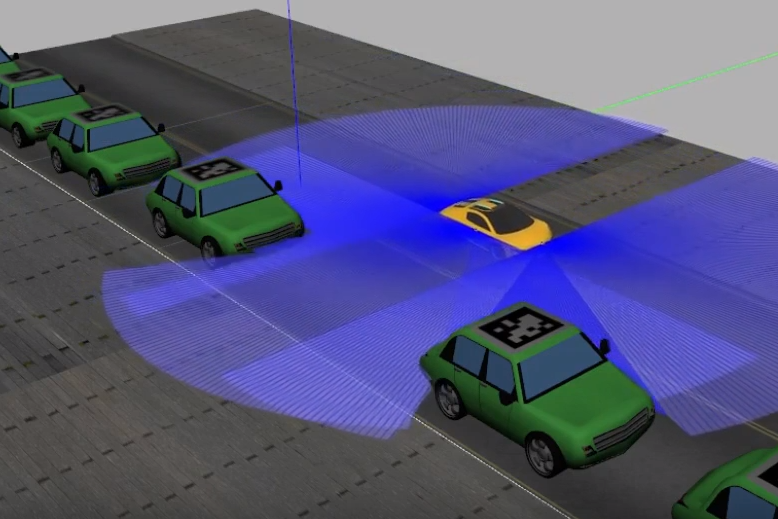
Global Navigation. Navigating a Tele Taxi autonomously.

Visual localization using April-tags.
Recognition of faces of lost people and save their locations.
Visual localisation based on the particle filter.
Follow a Person using a real TurtleBot2 robot with Deep Learning

Follow a Person in a hospital gazebo world using Deep Learning
Logic of a navigation algorithm for an automated vehicle
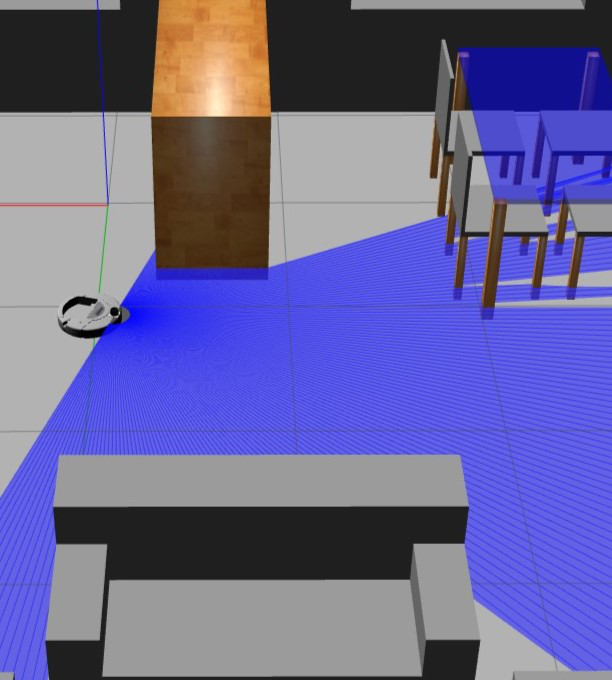
Navigation algorithm for an autonomous vacuum.
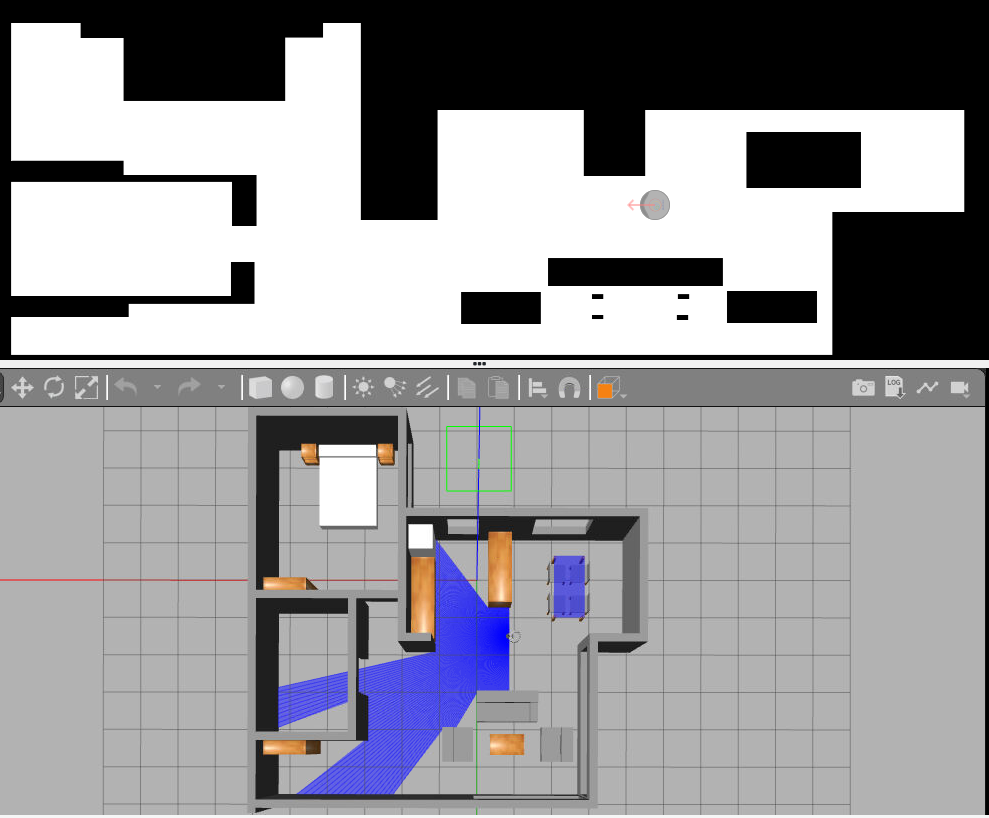
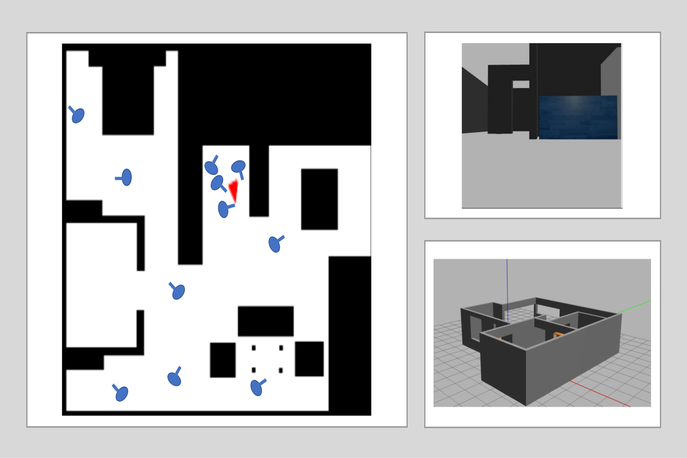
Robot self-localization using particle filter and laser sensor
Develop some basic exercises about computer vision

Classify images in real time using your own deep learning model.
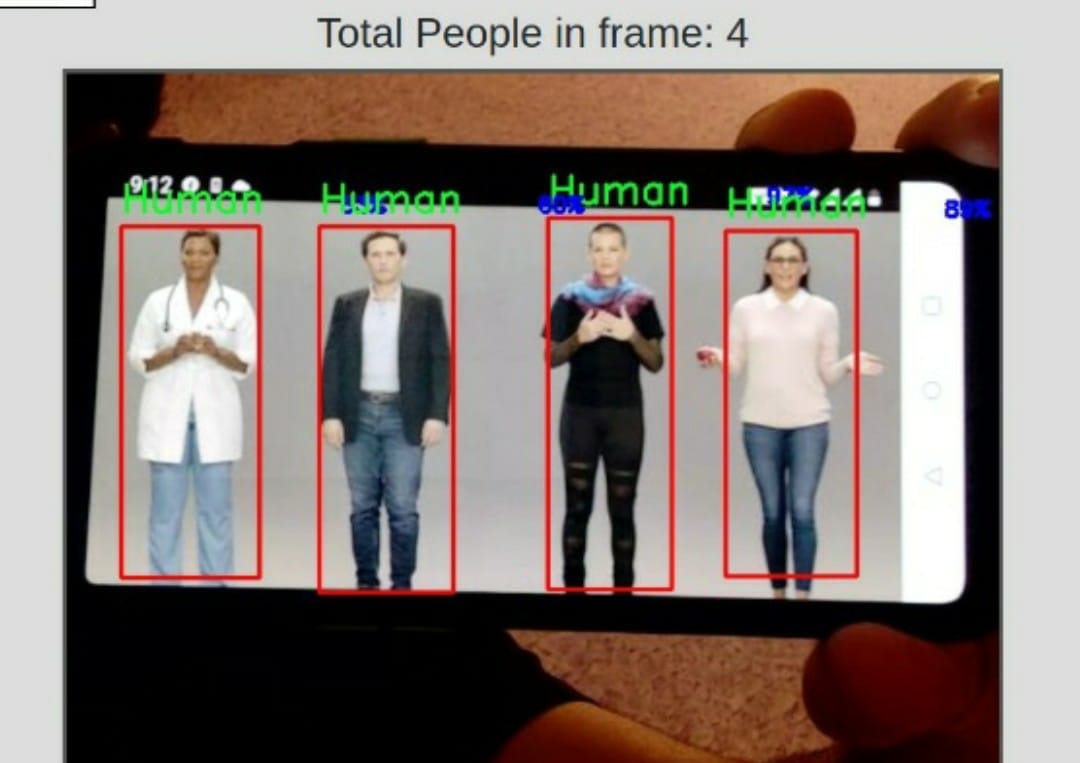
Deep learning-based Visual Object Detection Exercise.

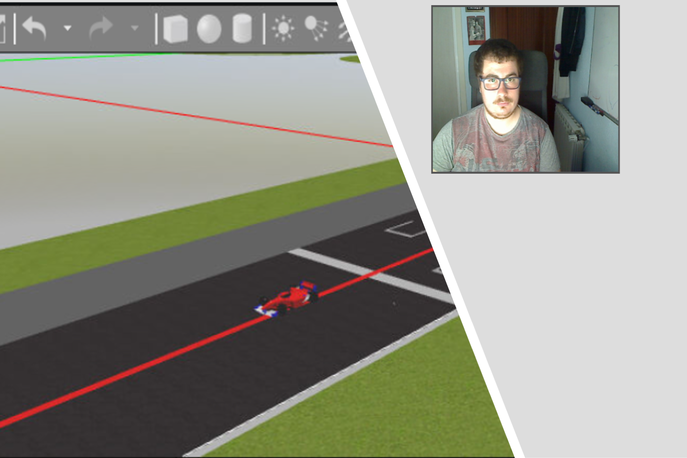
End to end visual control using deep learning.
Complete a lap using DWA method.
Locate the camera using inputs like rosbags or videos
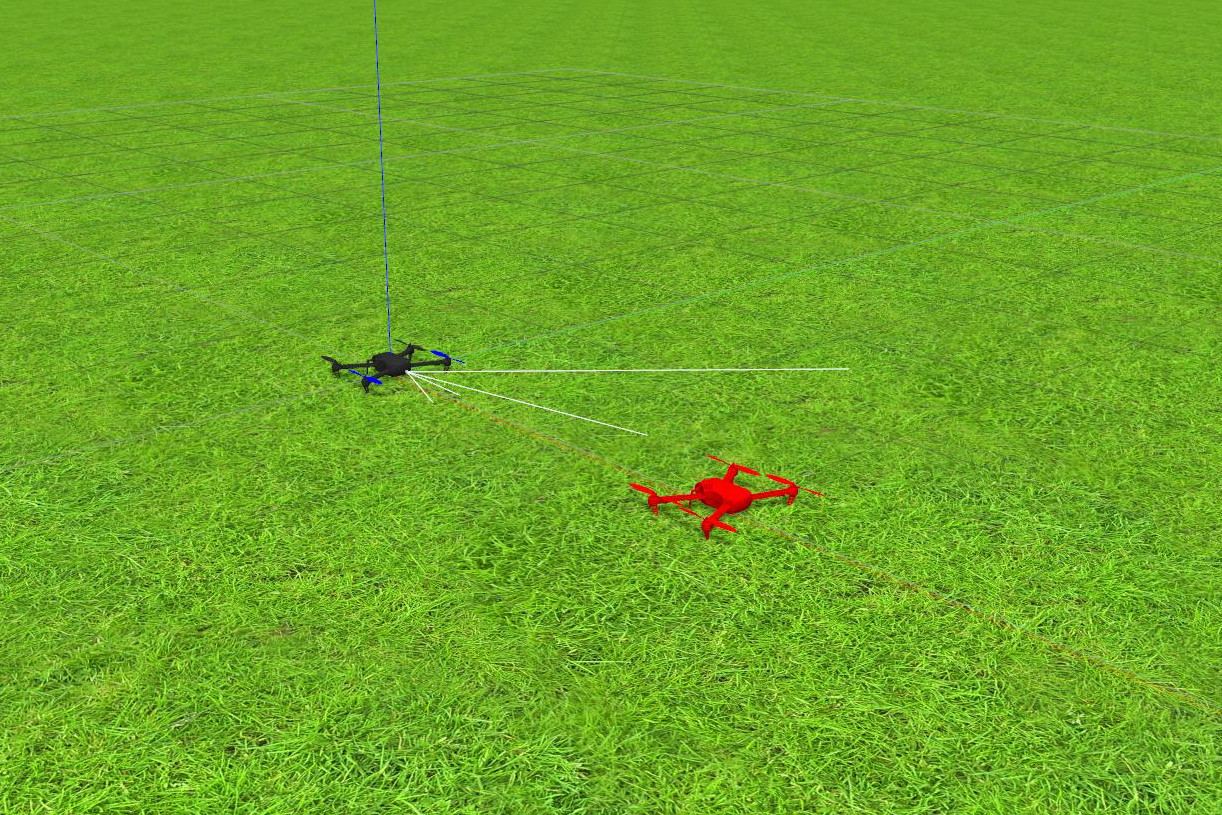
Game of cat and mouse with two quadrotors.
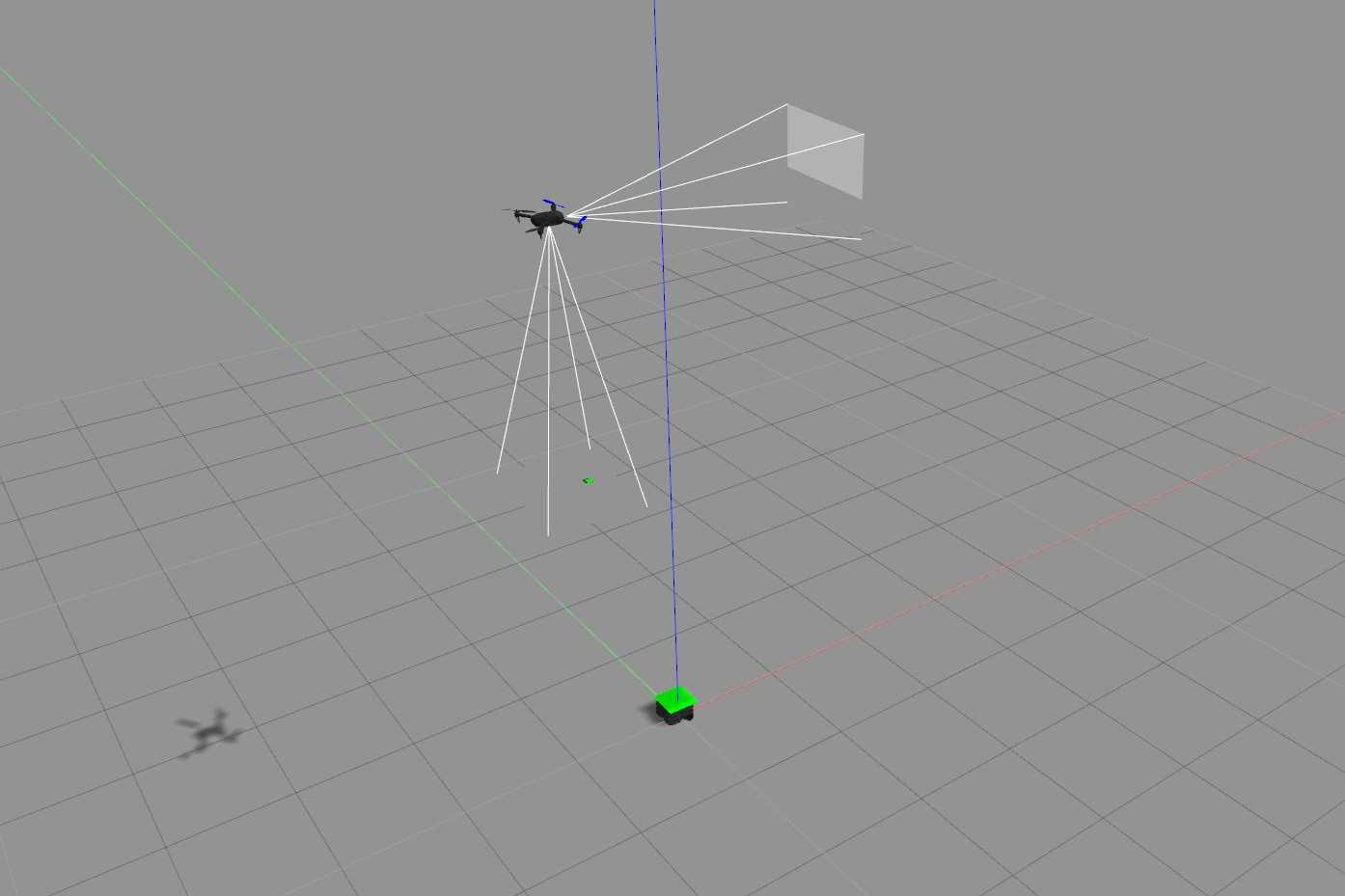
Follow a turtlebot on the ground using a camera.
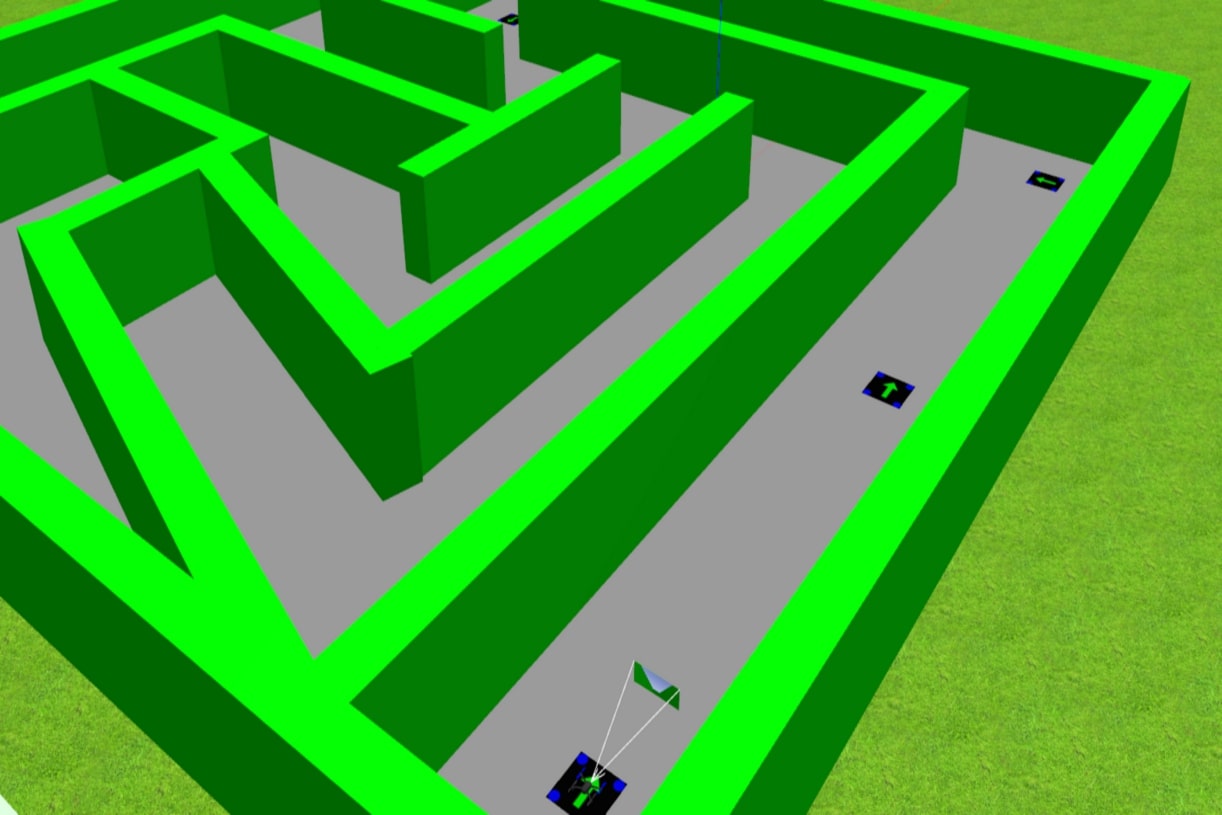
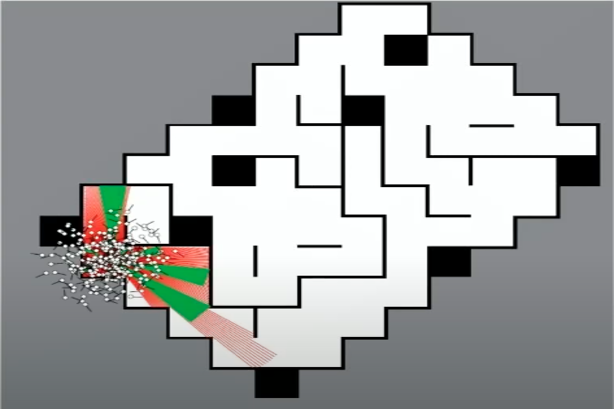
Escape from a labyrinth through visual signals.
Local navigation algorithm through the use of a PID controller.
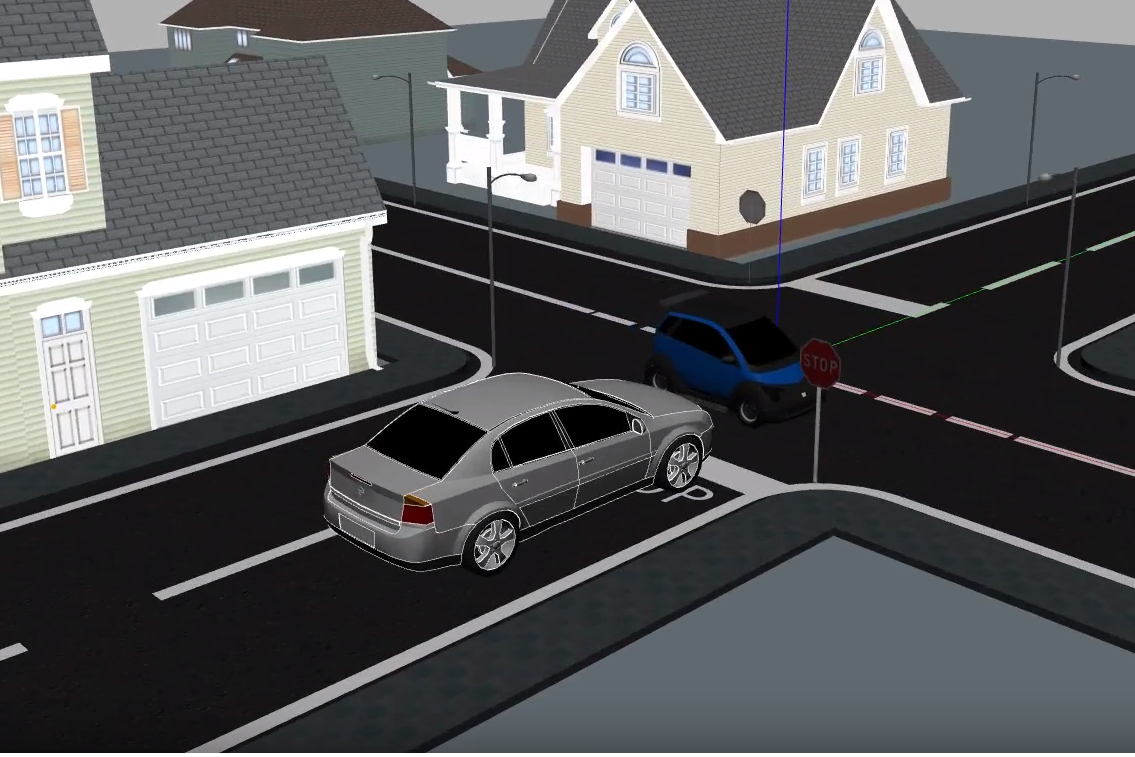
Car Junction. Automated vehicle must stop and pass once the road is clear.
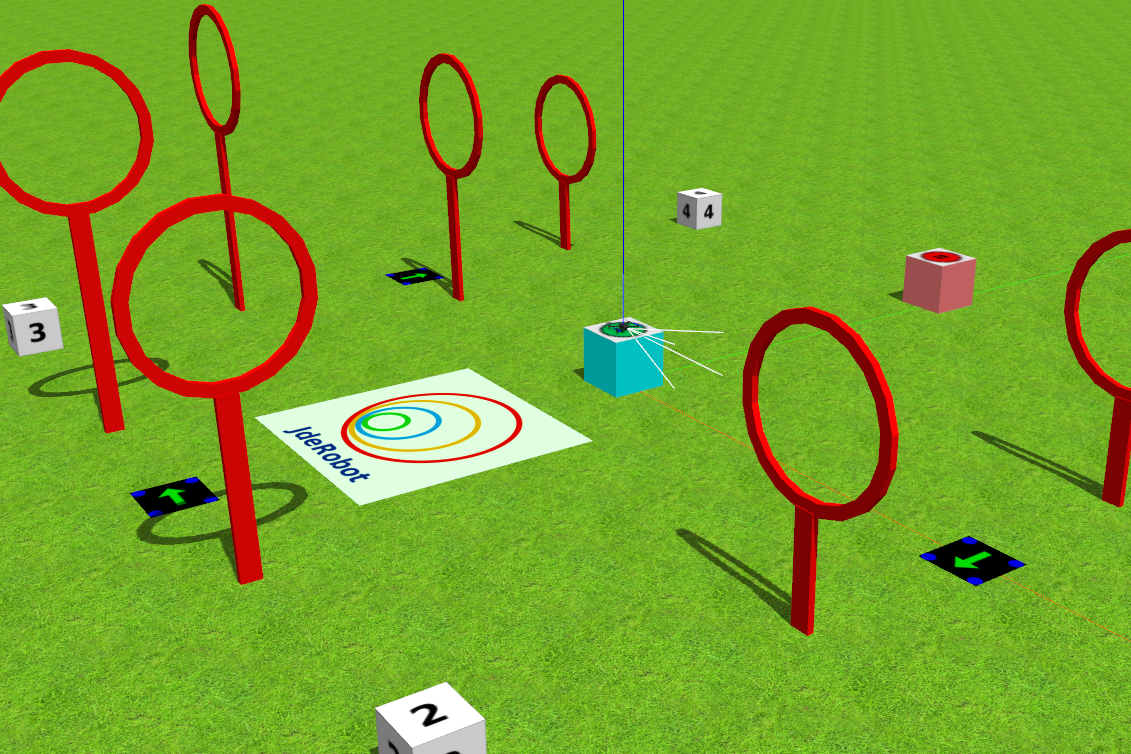
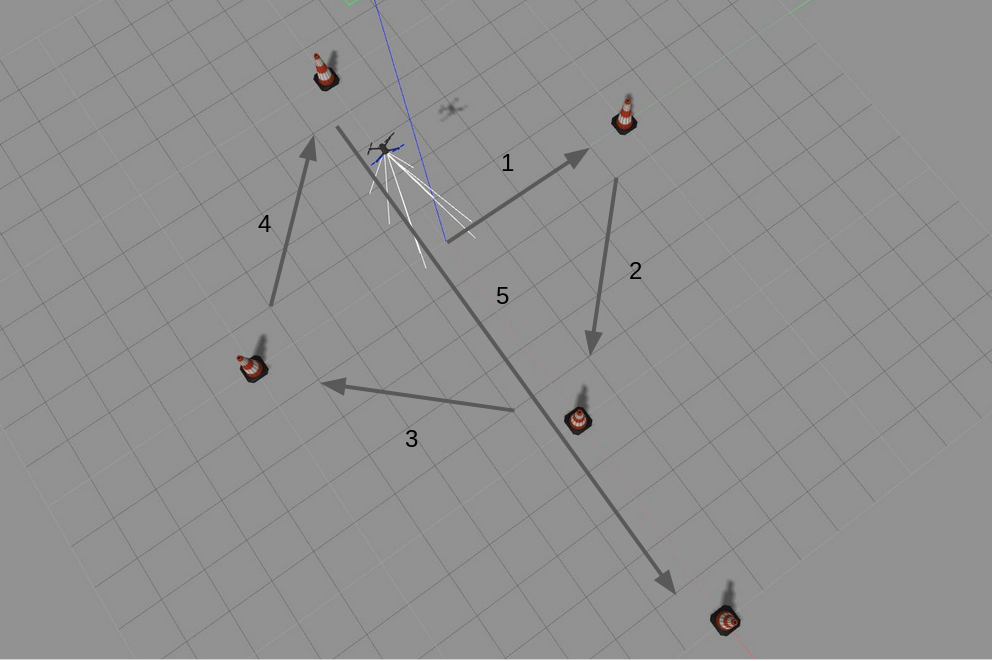
Learn about different drone controls and drone infrastructure.
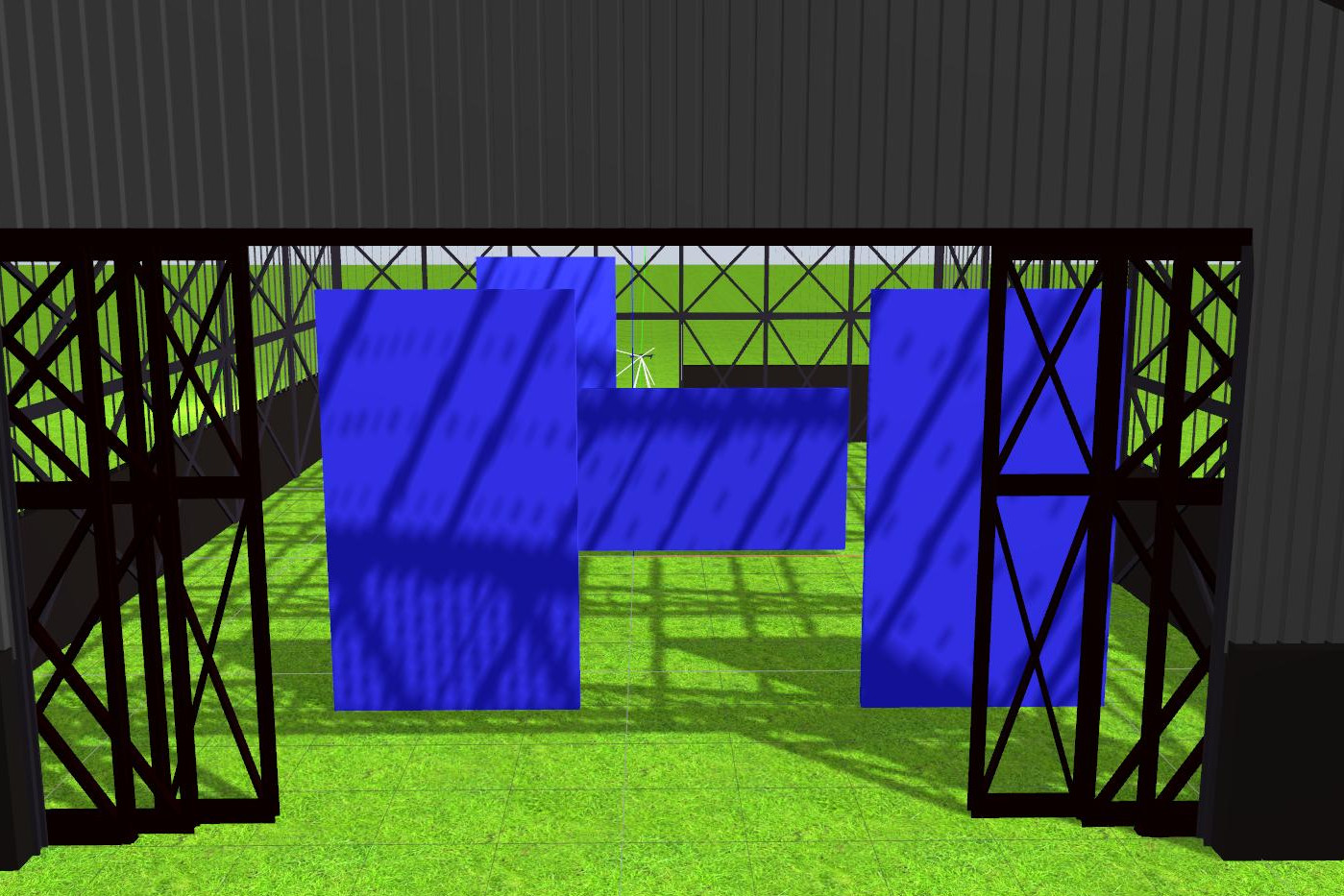
Escape from a hangar filled with moving obstacles.
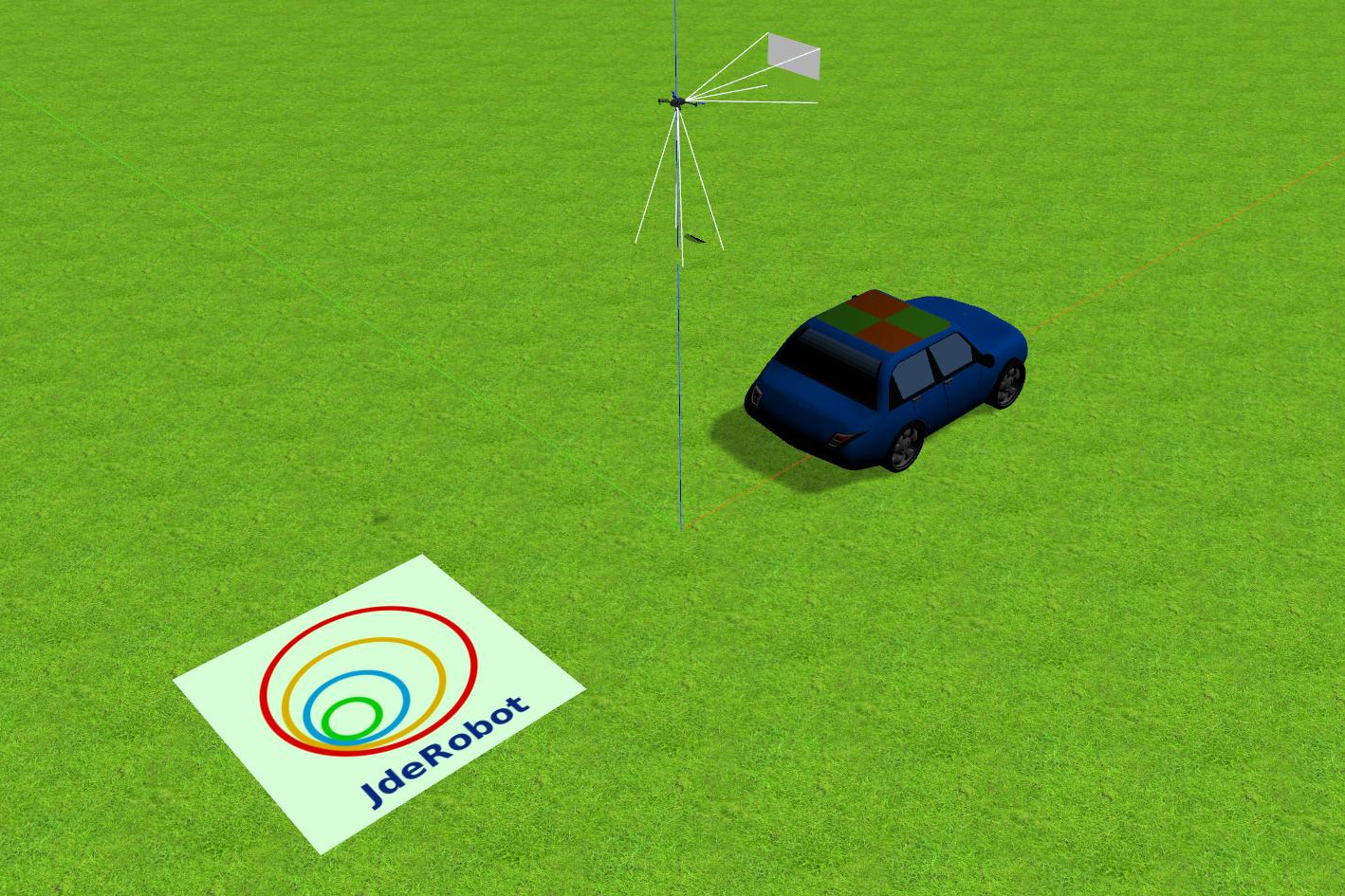
Visualization of a beacon and land on it.
Teleoperate to the robot using optical flow.

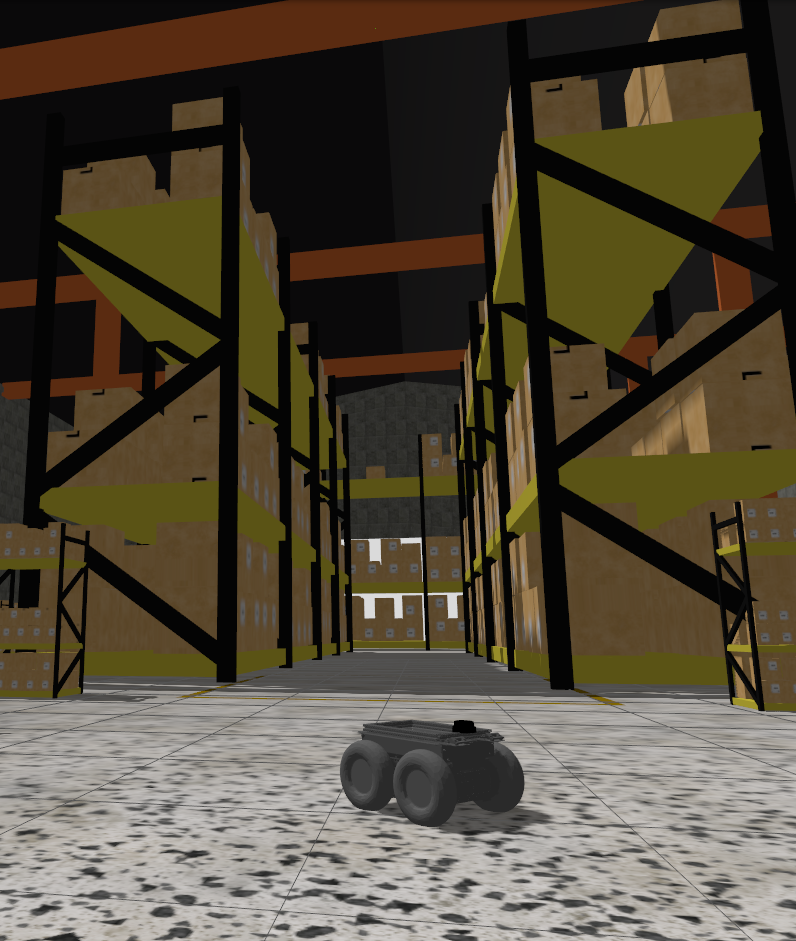
Deliver a package from the warehouse using a drone.
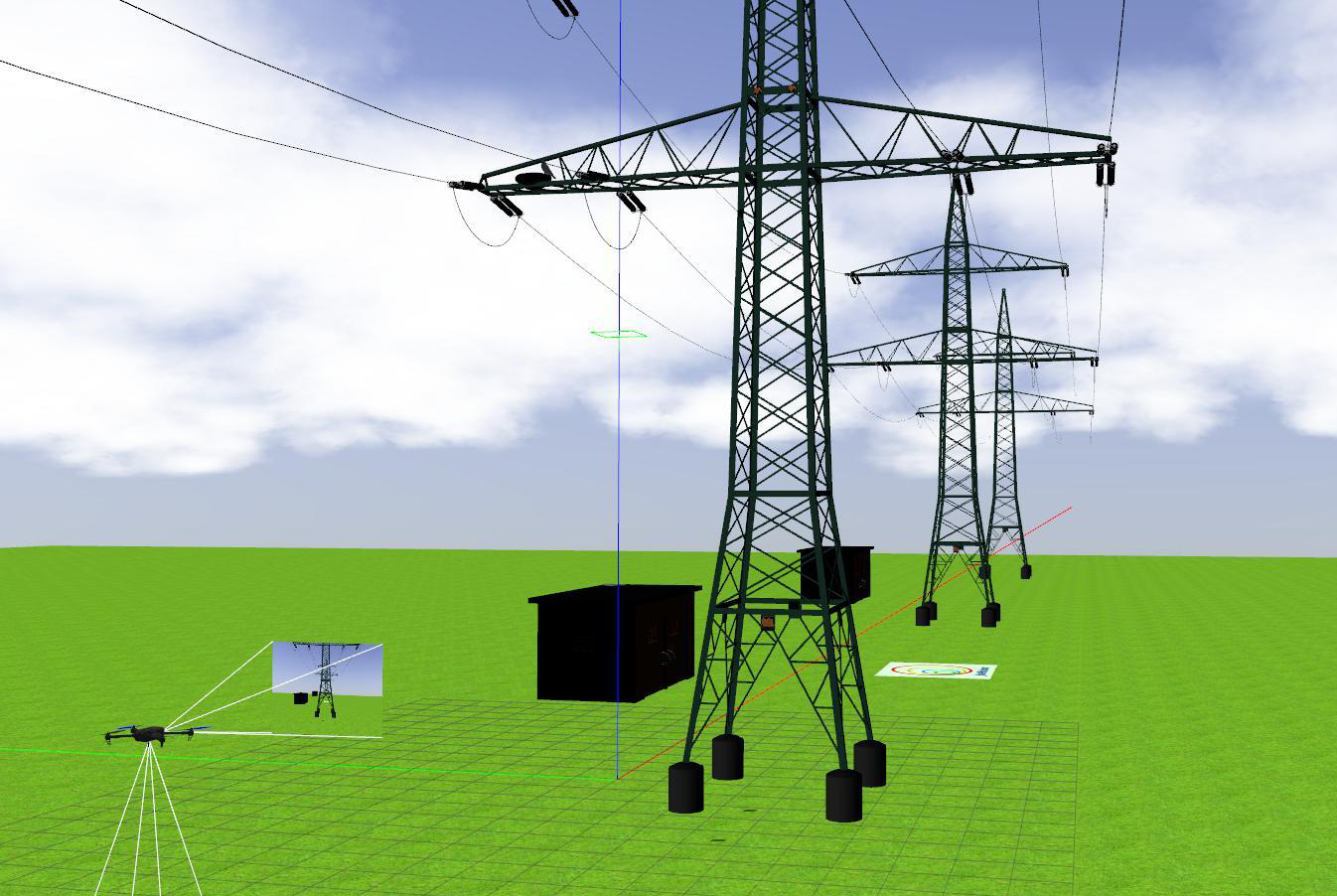
Perform inspection of the power towers, electrical wires, insulators (spring like object) using a drone.
Autonomous navigation and pick-and-place logic
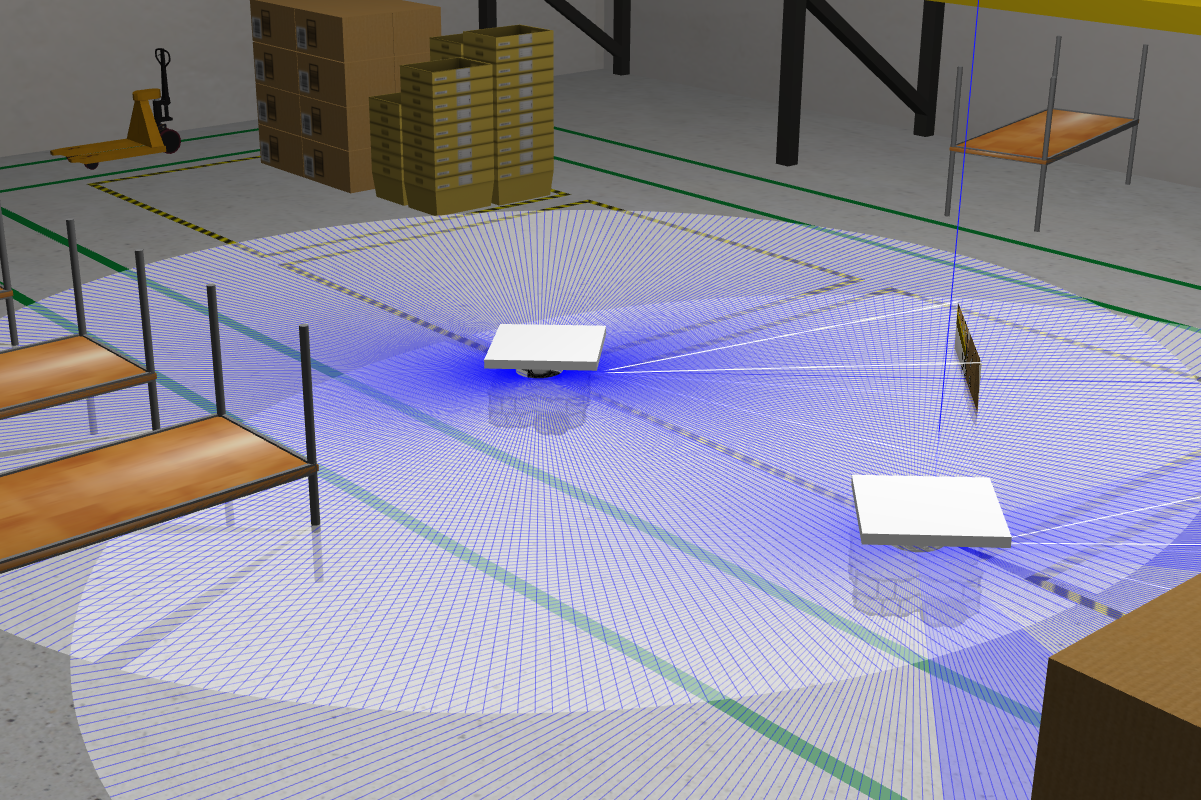
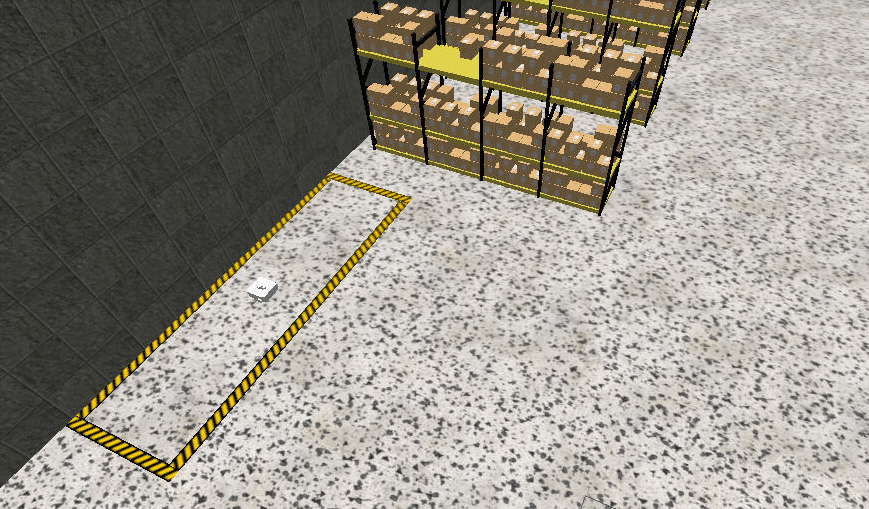
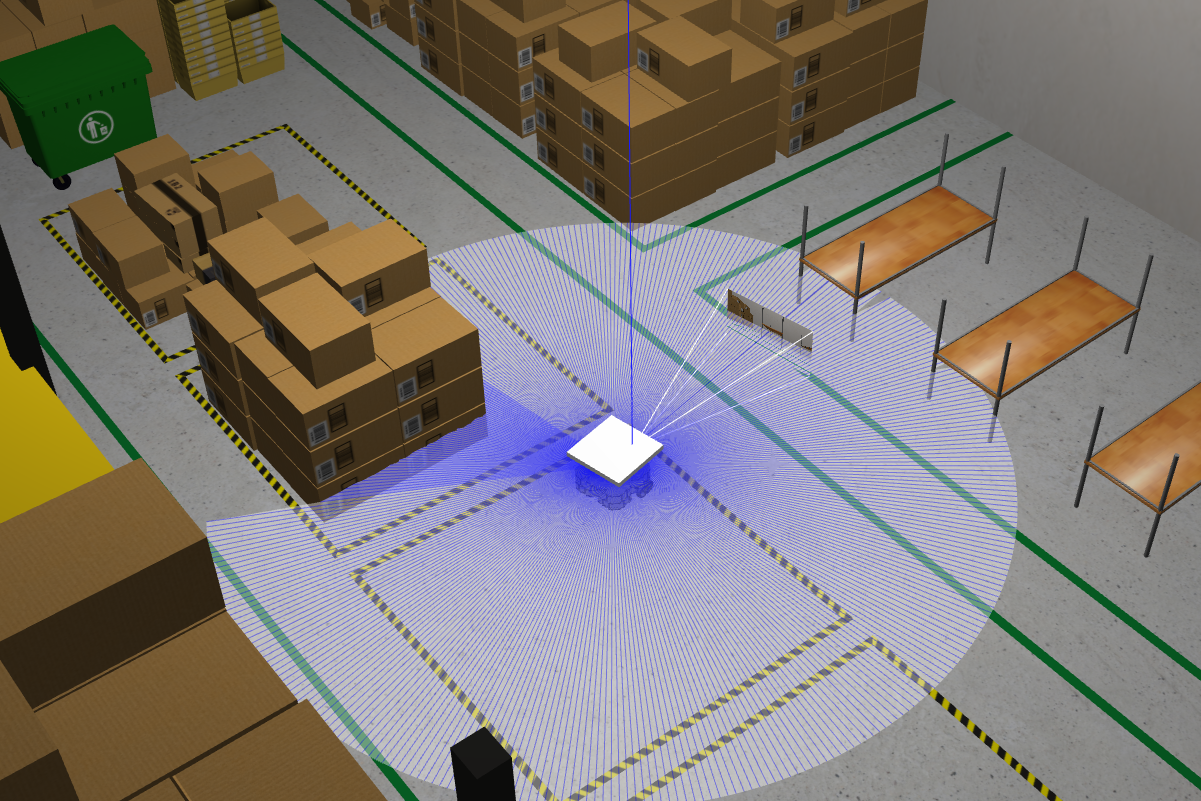
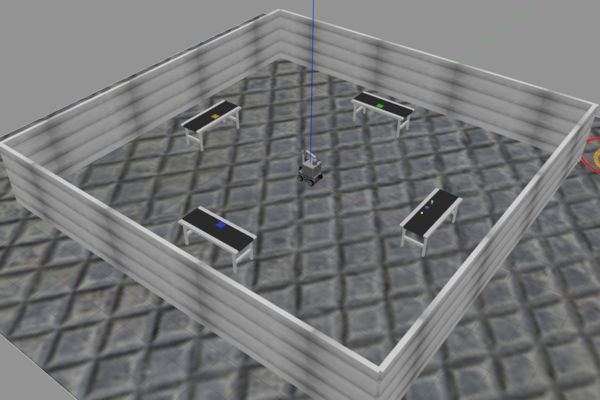
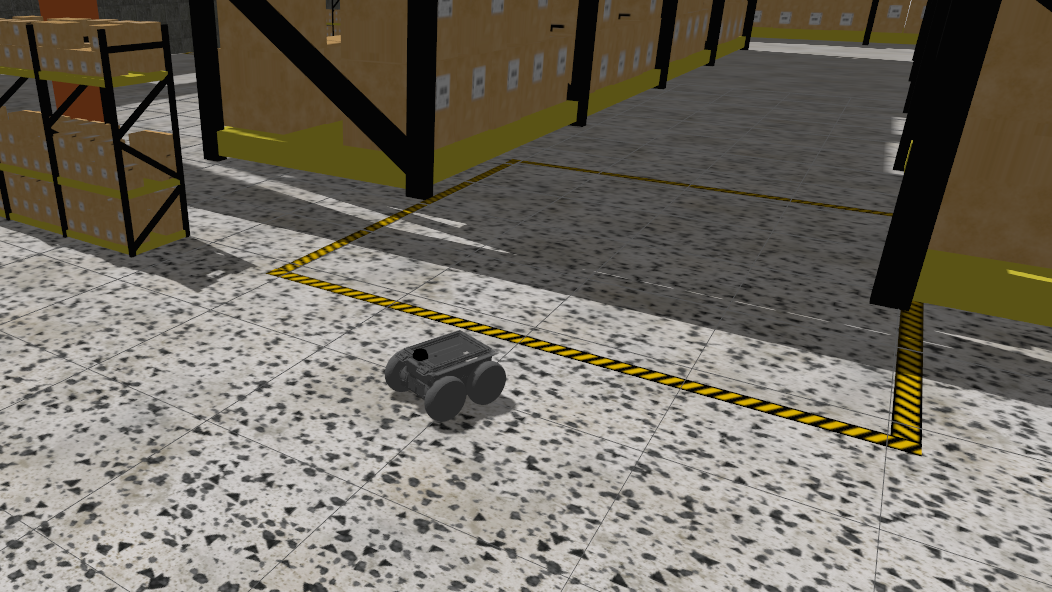
Multi robot warehouse planning
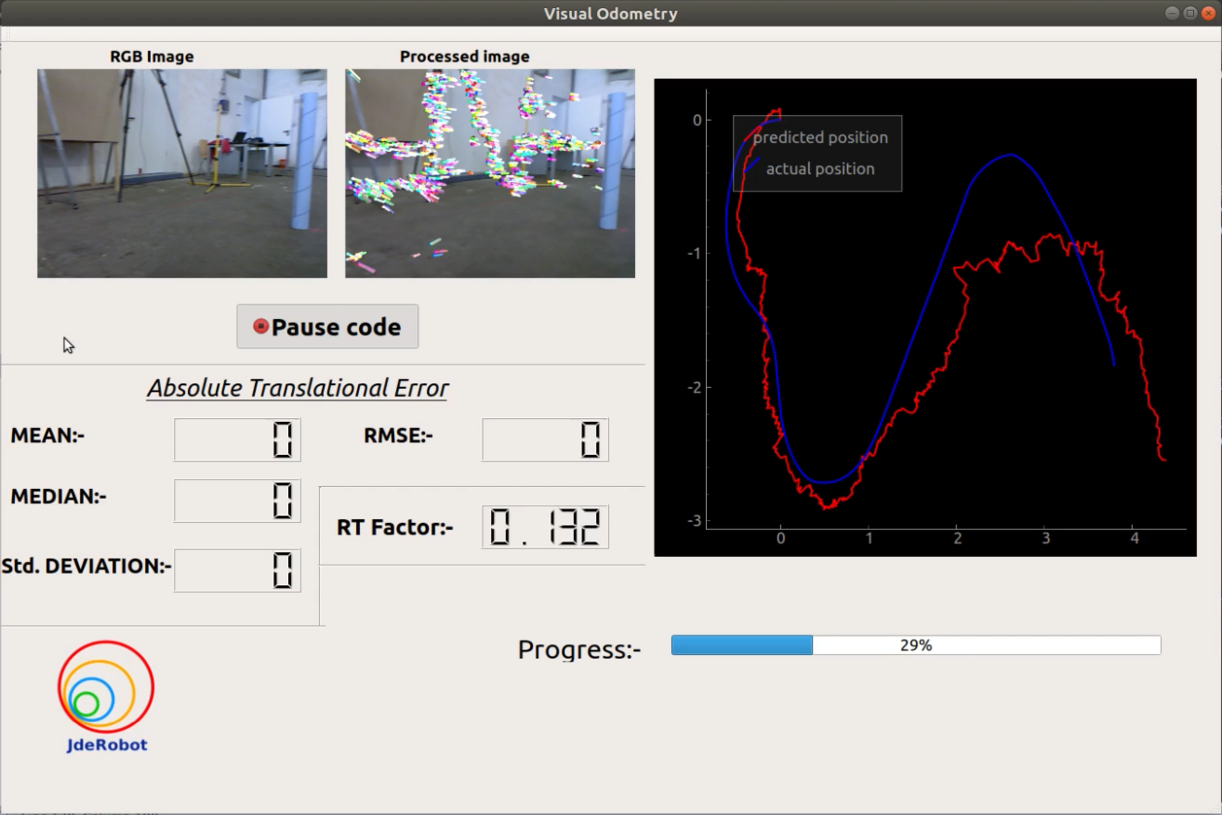
Solving the Visual Odometry problem in a given dataset
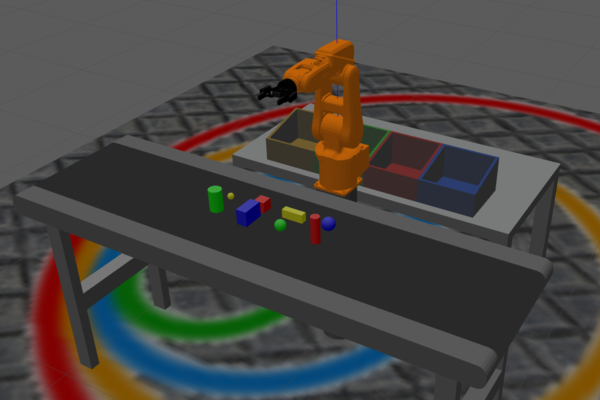
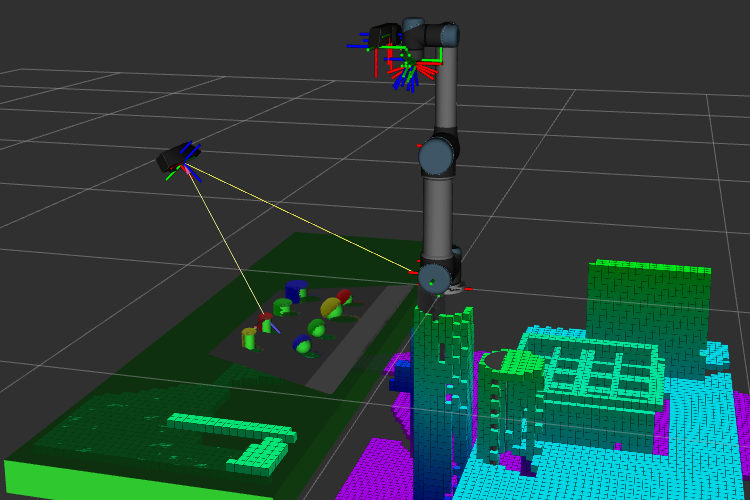
Pick and place with industrial robot arm and mechanical gripper
Detect object and obstacle with kinect camera
Pick and place with mobile manipulator
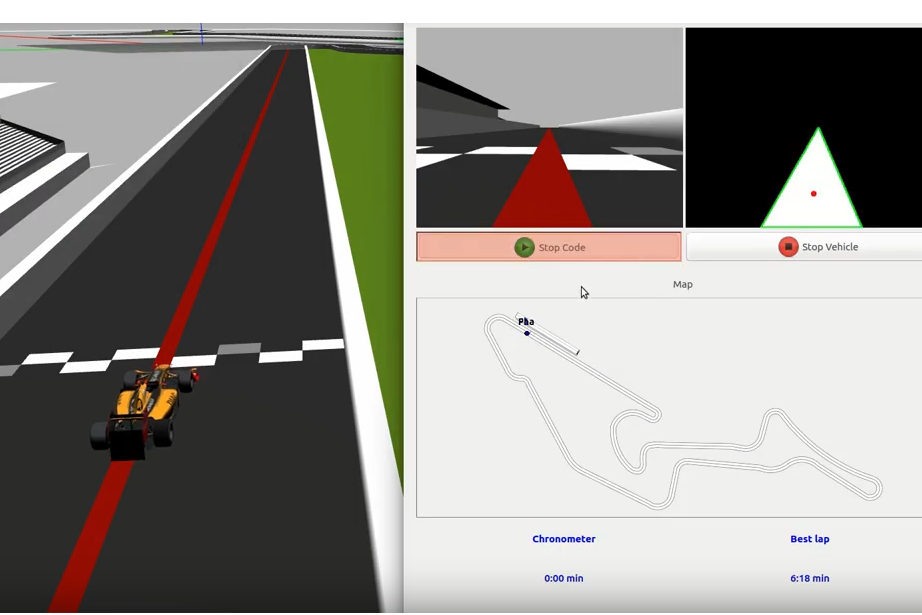
Complete a lap to the Nürburgring circuit as fast as it can
Basic behaviour of bump-spin using a finite state machine
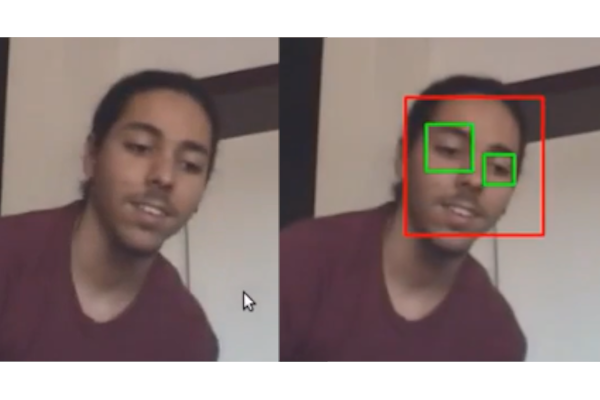
Detect people faces and follow them through a camera
Robot self-localization using particle filter and laser sensor
Path planning using visibility graph algorithm
Path planning using Rapidly-exploring Random Tree algorithm

Geometric map building using laser line segment extraction