Montecarlo Visual Loc
Goal
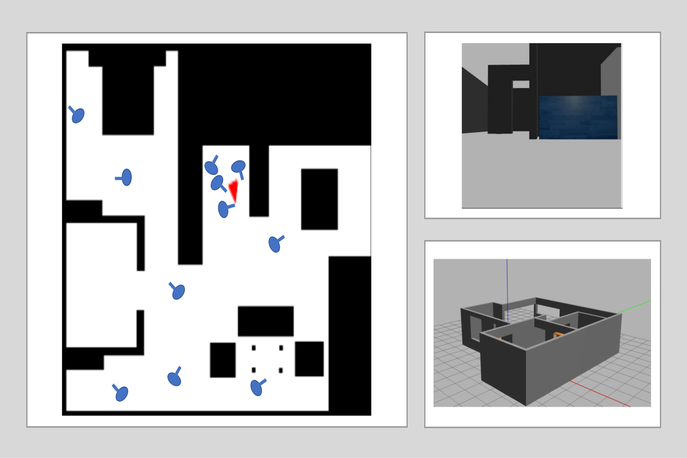
The objective of this exercise is to develop a visual localisation algorithm based on the particle filter.
Frequency API
Python
import Frequency- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency.tick(ideal_rate)- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
C++
#include "Frequency.hpp"- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency freq = Frequency();- to instanciate the Frequency class.freq.tick(ideal_rate);- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
Robot API
This exercise now supports ROS 2-direct implementation in addition to the original HAL-based approach. Below you’ll find the details for both options.
HAL-based Implementation
Python
import HAL- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).import WebGUI- to import the WebGUI (Web Graphical User Interface) library class. This class contains the functions used to view the debugging information, like image widgets.HAL.getImage()- to get the image.HAL.setV()- to set the linear speed.HAL.setW()- to set the angular velocity.HAL.getPose3d().x- to get the position of the robot (x coordinate).HAL.getPose3d().y- to obtain the position of the robot (y coordinate).HAL.getPose3d().yaw- to get the orientation of the robot.HAL.getOdom().x- to get the approximated X coordinate of the robot (with noise).HAL.getOdom().y- to get the approximated XY coordinate of the robot (with noise).HAL.getOdom().yaw- to get the approximated orientation position of the robot (with noise).HAL.getLaserData()- It allows to obtain the data of the laser sensor, which consists of 180 pairs of values (0-180º, distance in meters).WebGUI.showImage()- allows you to view a debug image or with relevant information.WebGUI.showParticles(particles)- shows the particles on the map. Accepts a list of particles as an argument. Each particle must be a list with [position_x, position_y, angle_in_radians, weight]. The values must be in gazebo world coordinate system.WebGUI.showPosition(x, y, yaw)- shows the estimated user position in the map view in blue. Accepts a list with [position_x, position_y, angle_in_radians]. The values must be in gazebo world coordinate system. The map view will also show the real position of the robot in red, so you can compare how good your algorithm is.WebGUI.mapToPose(x, y, yaw)- converts a map pixel to gazebo world coordinate system position.WebGUI.poseToMap(x, y, yaw)- converts a gazebo world coordinate system position to a map pixel.WebGUI.getMap(url)- Returns a numpy array with the image data in a 3 dimensional array (R, G, B, A), each value ranging from 0 to 1. The image is 1012x1012.WebGUI.getBGRMap(url)- Returns a numpy array with the image data in a 3 dimensional array (B, G, R), each value ranging from 0 to 255. The image is 1012x1012.
The instruction to get the map is:
array = WebGUI.getMap('/resources/exercises/montecarlo_visual_loc/images/mapgrannyannie.png')
The instruction to get the image with the roof textures is:
array = WebGUI.getColorMap('/resources/exercises/montecarlo_visual_loc/images/color_mapgrannyannie.png')
C++
#include "HAL.hpp"- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).#include "WebGUI.hpp"- to import the WebGUI (Web Graphical User Interface) library class. This class contains the functions used to view the debugging information, like image widgets.HAL::get_image();- to get the image (cv::Mat).HAL::set_v(velocity);- to set the linear speed.HAL::set_w(velocity);- to set the angular velocity.HAL::get_pose3d();- Returns the current pose as aHAL::Pose3dstruct with fieldsx,y(in m) andyaw(in rad).HAL::get_odom();- Returns the approximated pose with noise as aHAL::Pose3dstruct.HAL::get_laser_data();- Returns laser sensor data as aHAL::LaserDatastruct.WebGUI::set_image(image);- allows you to view a debug image (cv::Mat) or with relevant information.WebGUI::show_particles(particles);- shows the particles on the map. Accepts astd::vector<std::vector<double>>where each particle is{x, y, angle_in_radians, weight}in gazebo world coordinate system.WebGUI::show_position(x, y, yaw);- shows the estimated robot position in the map view in blue (gazebo world coordinates).WebGUI::map_to_pose(x, y, yaw);- converts a map pixel to gazebo world coordinate system position, returnsstd::vector<double>.WebGUI::pose_to_map(x, y, yaw);- converts a gazebo world coordinate system position to a map pixel, returnsstd::vector<double>.WebGUI::get_map(url);- Returns the map image as acv::Mat(BGRA). The URL is/resources/exercises/montecarlo_visual_loc/images/mapgrannyannie.png.WebGUI::get_bgr_map(url);- Returns the map image as acv::Mat(BGR, values 0–255).
In order to use the HAL-based controls you must include the following lines:
#include "HAL.hpp"
#include "WebGUI.hpp"
#include "Frequency.hpp"
void exercise() {
Frequency freq = Frequency();
// Enter sequential code!
while (true)
{
// Enter iterative code!
freq.tick();
}
}
ROS 2-direct Implementation
Use standard ROS 2 topics for direct communication with the simulation.
-
/cmd_vel- Publish to this topic to set both linear and angular velocities. Message type:geometry_msgs/msg/Twist -
/odom- Subscribe to this topic to receive the robot ground-truth odometry. Message type:nav_msgs/msg/Odometry -
/odom_noisy- Subscribe to this topic to receive the noisy odometry. Message type:nav_msgs/msg/Odometry -
/roombaROS/laser/scan- Subscribe to this topic to receive laser data. Message type:sensor_msgs/msg/LaserScan -
/camera/image_raw- Subscribe to this topic to receive the camera image. Message type:sensor_msgs/msg/Image
For image debugging:
-
/webgui/estimated_pose- Publish to this topic to display the estimated robot pose in the WebGUI. Message type:geometry_msgs/msg/PoseStamped
QoS:TRANSIENT_LOCAL, depth1 -
/webgui/particles- Publish to this topic to display the particle set in the WebGUI. Message type:geometry_msgs/msg/PoseArray
QoS:TRANSIENT_LOCAL, depth1 -
/webgui/image_debug- Publish to this topic to display a debug image in the WebGUI. Message type:sensor_msgs/msg/Image
Python
Note: Ensure this import is included in your script to access the Web GUI functionalities.
import WebGUI - to enable the Web GUI for visualizing camera images.
To have frequency control you need to use standard ROS 2 mechanisms to manage loop timing:
rclpy.spin()- Event-driven execution using callbacks.rclpy.spin_once()- Single-step processing, often with custom timers.rclpy.Rate()- Loop-based frequency control.
Note
WebGUI already initializes rclpy internally, so this should be taken into account when building a direct ROS 2 solution.
C++
In order to use direct ros controls you must include the following lines:
#ifndef USER_NODE
#define USER_NODE
#include "rclcpp/rclcpp.hpp"
class UserNode : public rclcpp::Node {
// Your class
};
#endif
You must define USER_NODE and a UserNode node class.
To have frequency control you may use a timer and a control function as follows:
UserNode() : Node("user_node")
{
// More subscribers and publishers
timer_ = create_wall_timer(100ms, std::bind(&UserNode::control_cycle, this));
};
// More Code
void control_cycle(){
// Your function
};
Theory
Probabilistic localisation seeks to estimate the position of the robot and the model of the surrounding environment:
- A. Probabilistic motion model. Due to various sources of noise (bumps, friction, imperfections of the robot, etc.) it is very difficult to predict the movement of the robot accurately. Therefore, it would be more convenient to describe this movement by means of a probability function, which will move with the robot’s movements [1].
- B. Probabilistic model of sensory observation. It is related to the sensor measurements at each instant of time. This model is built by taking observations at known positions in the environment and calculating the probability that the robot is in each of these positions [2].
- C. Probability fusion. This consists on accumulating the information obtained each instant, something that can be done using Bayes’ theorem. This fusion achieves a result in which in each observation some modes of the probability function go up and others go down, so that as the number of iterations advances, the probability will be concentrated in only one of the modes, which will indicate the position of the robot [3].
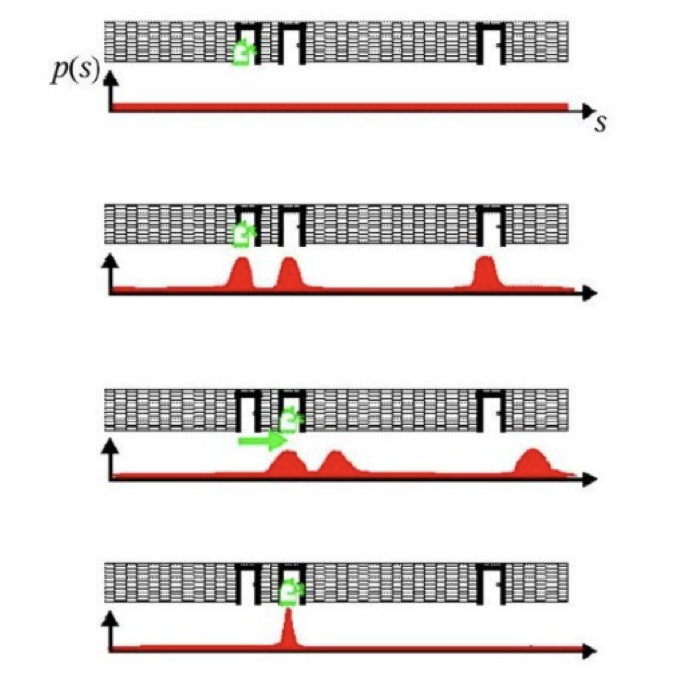
The following figure shows an example of probabilistic localisation. In the first phase, the robot does not know its initial state, the initial probability distribution is uniform. In the second phase, the robot is looking at a door, the sensory observation model determines that there are three zones or modes with equal probability of being the zone where the robot is. In the third phase, the robot is moving forward so the probabilistic motion model is applied, the probability distribution should move the same distance that the robot has moved, but as estimating the motion is difficult, what is done is to smooth it. In the last phase, the robot detects another door and this observation is merged with the accumulated information. This causes the probability to concentrate on a single possible area where it can be found, and thus ends the global localisation process.
Monte Carlo
- Monte Carlo localisation is based on a collection of particles or samples. Particle filters allow the localisation problem to be solved by representing the a posteriori probability function, which estimates the most likely positions of the robot. The a posteriori probability distribution is sampled, in a way where each sample is called a particle [4].
- Each particle represents a state (position) at time t and has an associated weight. With each movement of the robot, they perform a correction and decrease the accumulated error. After a number of iterations, the particles are grouped in the zones with the highest probability, until they converge to a single zone, which corresponds to the robot’s position.
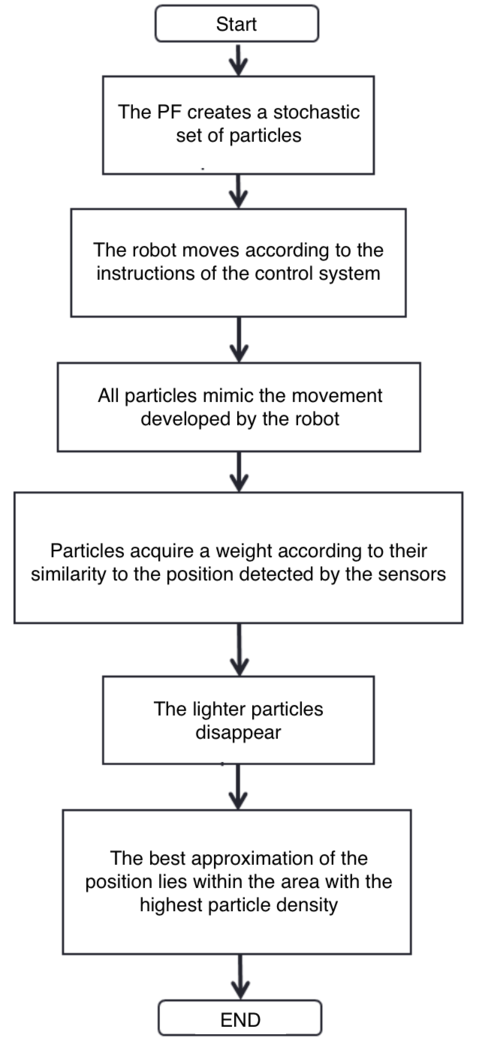
- When the program starts, the robot does not know where it is. However, the actual samples are evenly distributed, and the importance weights are all equal. After a long time, the samples nearing the current position have a higher probability, and those further away have a lower pobability. The basic algorithm is as follows:
- Initialise the set of samples. Their locations are evenly distributed and have the same weight.
- Repeat for each sample until: a) Move the robot a fixed distance and read the sensor. b) For each particle, update the location. c) Assign the importance weights of each particle to the probability of that sensor, and read that new location.
- Create a collection of samples, by sampling with replacements from the current set of samples, based on their importance weights.
- Let the group become the current round of samples.
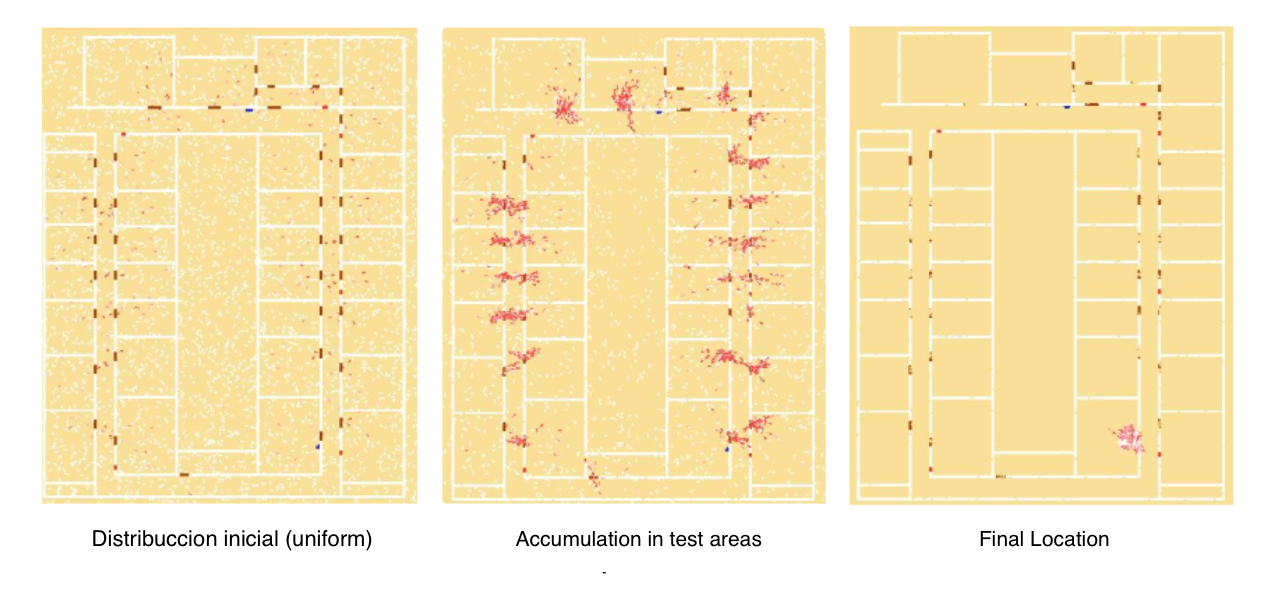
- The following figure shows an example of the operation of the particulate filter. At the initial instant the particles are uniformly distributed in the environment. As new observations are obtained, the particles accumulate in probability zones until they converge to the probability zone [5].
Demonstrative video of the solution
Contributors
- Contributors: Jose María Cañas, David Valladares
- Maintained by David Valladares
References
- http://www.natalnet.br/lars2013/WGWR-WUWR/122602.pdf
- https://robotica.unileon.es/vmo/pubs/robocity2009.pdf
- https://core.ac.uk/download/pdf/60433799.pdf
- http://intranet.ceautomatica.es/old/actividades/jornadas/XXIX/pdf/315.pdf
- https://www.researchgate.net/publication/283623730_Calculo_de_incertidumbre_en_un_filtro_de_particulas_para_mejorar_la_localizacion_en_robots_moviles