Global Navigation using TeleTaxi
Goal
The objective of this exercise is to implement the logic of a Gradient Path Planning (GPP) algorithm. Global navigation through GPP, consists of:
-
Once selected a destination, the GPP algorithm is responsible for finding the shortest path to it, avoiding, in this our case, everything that is not road.
-
Once the path has been selected, the logic necessary to follow this path and reach the objective must be implemented in the robot.
With this, it is possible for the robot to go to the marked destination autonomously and following the shortest path.
The solution can integrate one or more of the following difficulty increasing goals, as well as any other one that occurs to you:
-
Reach the goal.
-
Optimize the way to find the shortest path.
-
Arrive as quickly as possible to the destination.
Frequency API
Python
import Frequency- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency.tick(ideal_rate)- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
C++
#include "Frequency.hpp"- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency freq = Frequency();- to instanciate the Frequency class.freq.tick(ideal_rate);- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
Robot API
This exercise now supports ROS 2-direct implementation in addition to the original HAL-based approach. Below you’ll find the details for both options.
HAL-based Implementation
Python
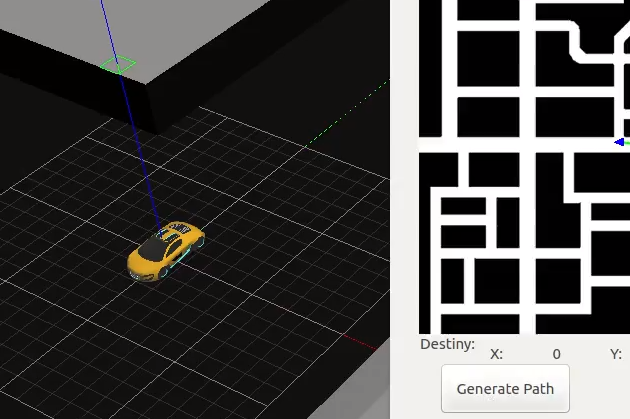
import HAL- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).import WebGUI- to import the WebGUI (Web Graphical User Interface) library class. This class contains the functions used to view the debugging information, like image widgets.HAL.setV()- to set the linear speed.HAL.setW()- to set the angular velocity.HAL.getPose3d()- returns x,y and theta components of the robot in world coordinates.WebGUI.showNumpy(numpy)- shows Gradient Path Planning field on the user interface. It represents the values of the field that have been assigned to the array passed as a parameter. Accepts as input a two-dimensional uint8 numpy array whose values can range from 0 to 255 (grayscale). In order to have a grid with the same resolution as the map, the array should be 400x400.WebGUI.showPath(array)- shows a path on the map. The parameter should be a 2D array containing each of the points of the path.WebGUI.getTargetPose()- returns x,y coordinates of chosen destionation in the world. Destination is set by clicking on the map image.WebGUI.getMap(url)- - Returns a numpy array with the image data in grayscale as a 2 dimensional array. The URL of the Global Navigation map is ‘/resources/exercises/global_navigation/images/cityLargenBin.png’, so the instruction to get the map isarray = WebGUI.getMap('/resources/exercises/global_navigation/images/cityLargenBin.png')WebGUI.rowColumn(vector)- returns the index in map coordinates corresponding to the vector in world coordinates passed as parameter.
The map image has a resolution of 400x400 pixels and indicates whether there is an obstacle or not by its color. The map in the Gazebo world has its center in [0, 0] and it has a width and height of 500 meters. Therefore, each of the pixels in the map image represent a cell in the Gazebo world with a width and height of 1.25 meters.
C++
#include "HAL.hpp"- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).-
#include "WebGUI.hpp"- to import the WebGUI (Web Graphical User Interface) library class. This class contains the functions used to view the debugging information, like image widgets. HAL::set_v(velocity);- sets the linear velocity of the taxi. The input is afloat. Returnsvoid.HAL::set_w(velocity);- sets the angular velocity of the taxi. The input is afloat. Returnsvoid.HAL::get_pose3d();- returns the current robot pose as aHAL::Pose3d.HAL::get_pose3d().x;- gets the robot x position in world coordinates (double).HAL::get_pose3d().y;- gets the robot y position in world coordinates (double).HAL::get_pose3d().yaw;- gets the robot orientation around the vertical axis in world coordinates (double).WebGUI::show_image(image);- displays a debug image in the WebGUI. The input must be acv::Mat. Returnsvoid.WebGUI::show_path(path);- displays a path on the map. The input must be astd::vector<std::vector<int>>, where each inner vector represents a grid cell of the path. Returnsvoid.WebGUI::get_target_pose();- returns the selected destination in world coordinates as astd::vector<double>.WebGUI::get_map(url);- returns the map image as acv::Mat. The input must be astd::stringwith the map URL.WebGUI::world_to_grid(pose);- converts world coordinates to map grid coordinates. The input must be astd::vector<double>and the function returns astd::vector<int>.WebGUI::grid_to_world(cell);- converts map grid coordinates to world coordinates. The input must be astd::vector<double>and the function returns astd::vector<double>.
In order to use the HAL-based controls you must include the following lines:
#include "HAL.hpp"
#include "WebGUI.hpp"
#include "Frequency.hpp"
void exercise() {
Frequency freq = Frequency();
// Enter sequential code!
while (true)
{
// Enter iterative code!
freq.tick();
}
}
C++ API examples
-
Example to load the map:
cv::Mat map = WebGUI::get_map("/resources/exercises/global_navigation/images/cityLargenBin.png"); -
Example to get the selected target:
std::vector<double> target = WebGUI::get_target_pose(); double target_x = target[0]; double target_y = target[1]; -
Example to convert coordinates:
// World coordinates to grid coordinates std::vector<double> world_pose = {target_x, target_y}; std::vector<int> grid_cell = WebGUI::world_to_grid(world_pose); int row = grid_cell[0]; int col = grid_cell[1]; // Grid coordinates to world coordinates std::vector<double> grid_cell_as_double = {120.0, 250.0}; std::vector<double> world_pose_from_grid = WebGUI::grid_to_world(grid_cell_as_double); double world_x = world_pose_from_grid[0]; double world_y = world_pose_from_grid[1]; -
Example to show a planned path:
std::vector<std::vector<int>> path = { {10, 20}, {11, 20}, {12, 21} }; WebGUI::show_path(path);
ROS 2-direct Implementation
Use standard ROS 2 topics for direct communication with the simulation.
-
/cmd_vel- Publish to this topic to set both linear and angular velocities. Message type:geometry_msgs/msg/Twist -
/odom- Subscribe to this topic to receive the robot odometry.
Message type:nav_msgs/msg/Odometry -
/webgui/current_target- Subscribe to this topic to receive the current goal selected from the WebGUI.
Message type:geometry_msgs/msg/Point
QoS:TRANSIENT_LOCAL, depth1
For image debugging:
-
/webgui/path- Publish to this topic to display the planned path in the WebGUI. Message type:nav_msgs/msg/Path -
/webgui/debug_image- Publish to this topic to display a debug image typically used to visualize the cost map, wavefront expansion, or any other intermediate grid representation. Message type:sensor_msgs/msg/Image
Python
Note: Ensure this import is included in your script to access the Web GUI functionalities.
import WebGUI - to enable the Web GUI for visualizing camera images.
To have frequency control you need to use standard ROS 2 mechanisms to manage loop timing:
rclpy.spin()- Event-driven execution using callbacks.rclpy.spin_once()- Single-step processing, often with custom timers.rclpy.Rate()- Loop-based frequency control.
Note
WebGUI already initializes rclpy internally, so this should be taken into account when building a direct ROS 2 solution.
C++
In order to use direct ros controls you must include the following lines:
#ifndef USER_NODE
#define USER_NODE
#include "rclcpp/rclcpp.hpp"
class UserNode : public rclcpp::Node {
// Your class
};
#endif
You must define USER_NODE and a UserNode node class.
To have frequency control you may use a timer and a control function as follows:
UserNode() : Node("user_node")
{
// More subscribers and publishers
timer_ = create_wall_timer(100ms, std::bind(&UserNode::control_cycle, this));
};
// More Code
void control_cycle(){
// Your function
};
Videos
Theory
Motion Planning is a term used in robotics to find a sequence of valid configurations that moves the robot from source to destination. Motion Planning algorithms find themselves in a variety of settings, be it industrial manipulators, mobile robots, artificial intelligence, animations or study of biological molecules.
There are mainly 2 methods to solve the exercise, Gradient Path Planning, Sampling Based Path Planning
Gradient Path Planning
One such method for Motion Planning is Gradient Path Planning. GPP works on the principle of potential fields. The obstacles in the path serve as potential walls to the path planner, and the target serves as potential well. By combining all the potential walls and wells, a path is constructed as a downward slope. The robot follows that path to reach it’s destination.
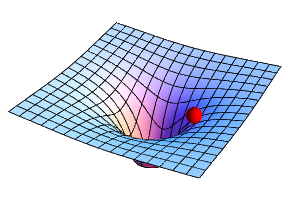
Gradient Path Planning can be implemented using Brushfire Algorithm or Wave Front Algorithm. Next section explains the working of Wave Front Algorithm.
Wave Front Algorithm
Wave Front Algorithm is BFS based approach to build a path from source to destination. The algorithm works by assigning weights to a grid of cells. Given the source and target, the algorithm starts from the target node and moves outwards like a ripple, while progressively assigning weights to the neighboring cells.
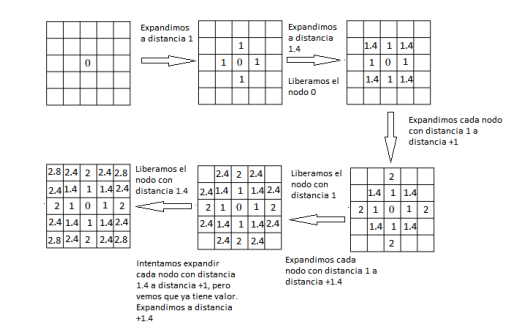
Assigning Weights
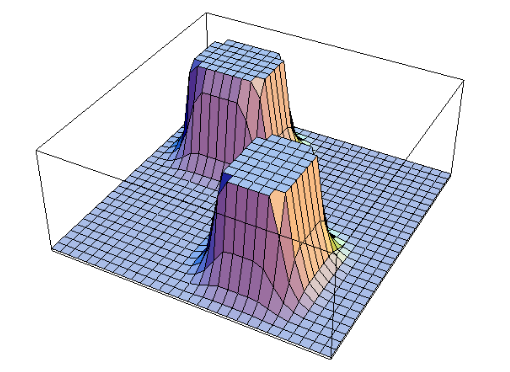
As for obstacles, additional weights are added to the cells that are close to obstacles. Intuitively, the weights represent the superposition of waves that are reflected from the walls of obstacles.
Superposition of Waves
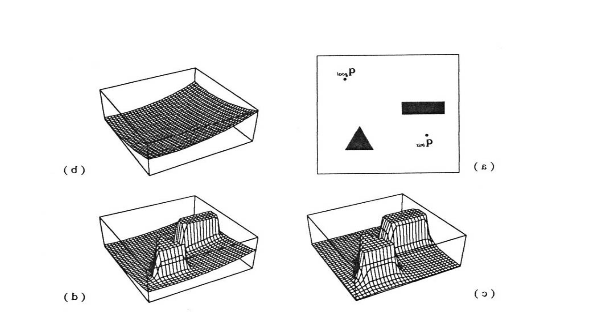
The algorithm stops upon reaching the source. To navigate through the generated path, the robot follows the path indicated by decreasing weights (a downhill drive). A grayscale image representation quite clearly depicts the path the robot might follow!
Gray Scale Representation
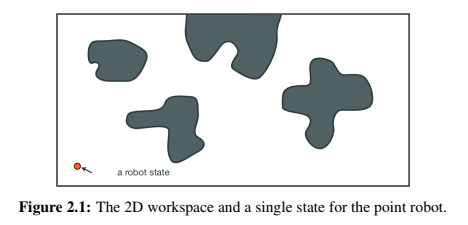
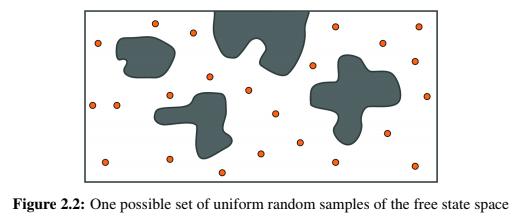
Sampling Based Path Planning
Sampling based Path Planning employs sampling of the state space of the robot in order to quickly and effectively plan paths, even with differential constraints or those with many degrees of freedom. Some of the algorithms under this class are:
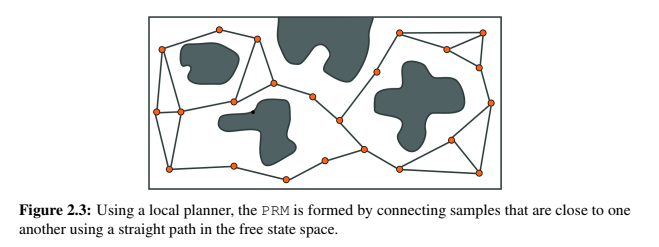
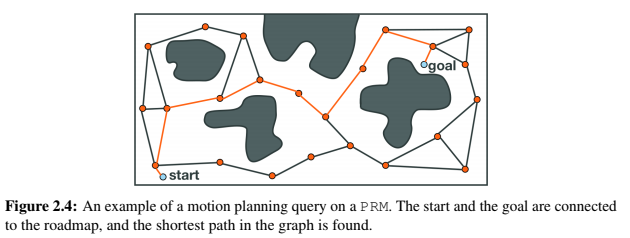
Probabilistic Roadmap
These methods work by randomly sampling points in the workspace. Once the desired number of samples are obtained, the roadmap is constructed by connecting the random samples to form edges. On the resulting graph formed, any shortest path algorithm (A*, Dijkstra, BFS) is applied to get our resulting path.
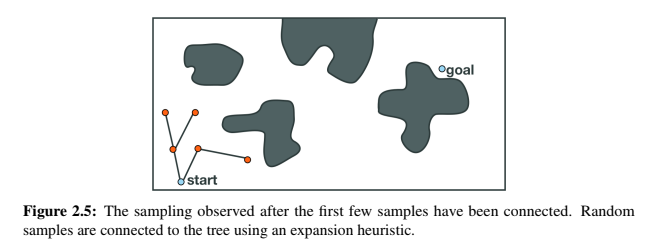
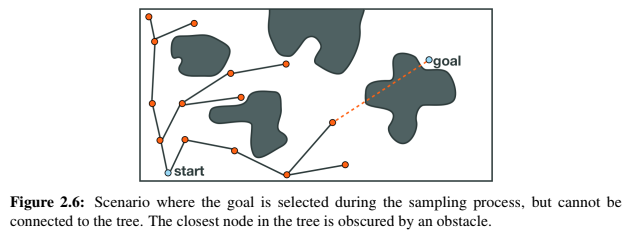
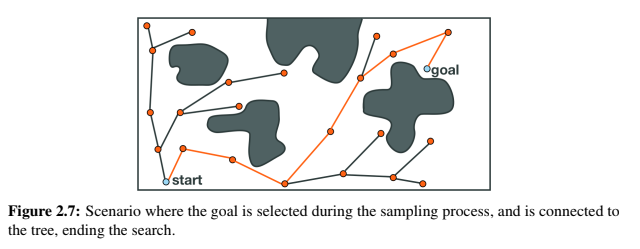
Tree Based Planner
Tree Based Planners are very similar to Probabilistic Roadmaps, except for the fact that there are no cycles involved in tree based planners. There are a variety of tree based planners, like RRT, EST, SBL and KPIECE. These algorithms work heuristically, working from the root node, a tree (a graph without cycles) is constructed.
Hints
Simple hints provided to help you solve the global navigation exercise. The hints are focused on solving the exercise through GPP algorithm.
Path Planning
Since, the map has already been divided into grids, we can directly work on the grid! Path Planning involves a BFS based search starting from the destination. The psuedo code for the algorithm is:
- Step1: insert Target Node into priority queue
- Step2: c = pop node from priority queue
- Step3: if c == start node End
- Step4: if c == obstacle Save to another list and goto Step2
- Step5: assign weight to neighbors of c if previously unassigned
- Step6: insert neighbors of c to priority queue
- Step7: goto Step2
Assignment of weights to the cells is arbitrary. Generally, diagonally neighboring cells are assigned a greater weight than the other neighbors. Apart from all the assignment, the additional weight of cells close to obstacles is extremely important, as it is the one that is going to help avoid collisions!
Important Points to Remember
-
You may use
WebGUI.getMap()to know whether an obstacle is present at (i, j) coordinate of the map. Also, in order to work with this grid, we have to invert our usage of coordinates. Implying, (i, j) can be accessed using (j, i). -
In order to assign those extra weights, we may take the obstacle points we saved earlier, and add extra values to the neighbors of the obstacle cell afterwards.
Path Navigation
The next step involves Path Navigation. We can start by defining the low level implementation through linear speed and angular speed. Using the orientation of the robot, distance and direction of the target, linear speed and angular speeds can be assigned to the robot.
To navigate effectively, we assign local goal points which eventually lead to the final destination. These local goal points can be selected by choosing 2 points, which occur one after another recursively.
Also, make sure that the selection is done from a big enough radius, otherwise during navigation the robot may pass the grid and reach a local minimum value.
All in all, the exercise is a little on the tough side. But after spending some time working on this exercise, all the bugs, issues and hints provided may make sense!
Demonstrative Video
Global Navigation with GPP:
Global Navigation teletaxi with OMPL:
Contributors
- Contributors: Alberto Martín, Francisco Rivas, Francisco Pérez, Jose María Cañas, Nacho Arranz, Nay Oo Lwin, Javier Izquierdo.
- Maintained by Sakshay Mahna, Javier Izquierdo.