Service Robots exercises
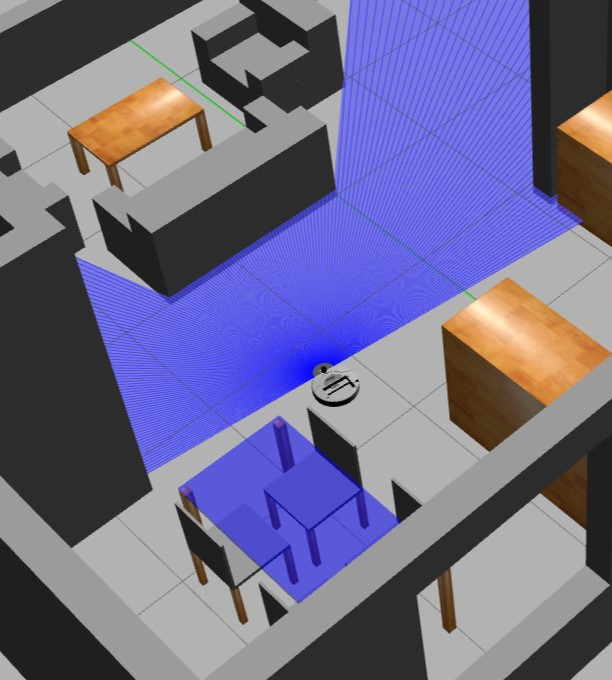
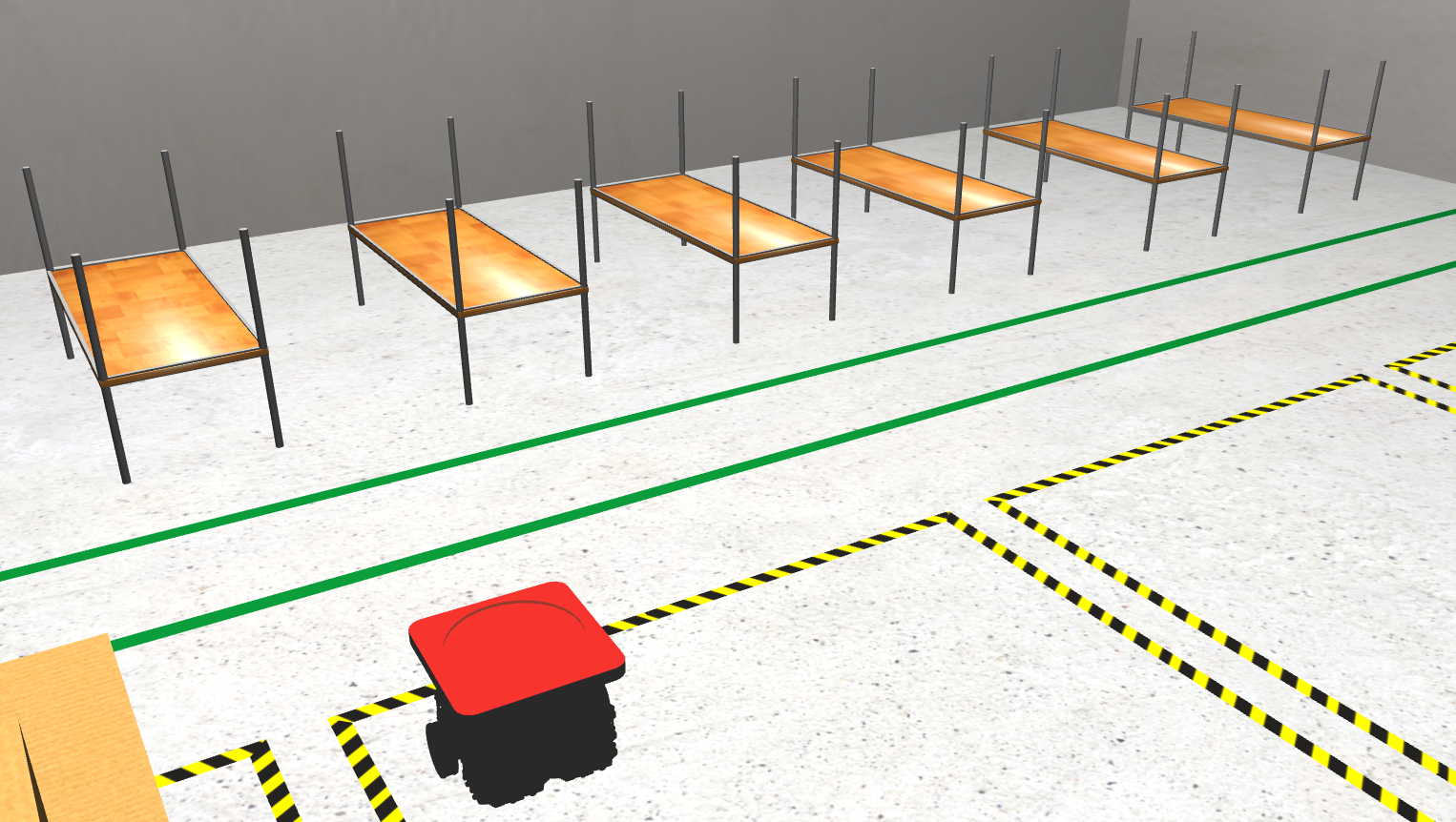
Navigation algorithm for an autonomous vacuum
Foraging algorithm for an autonomous vacuum with good localization
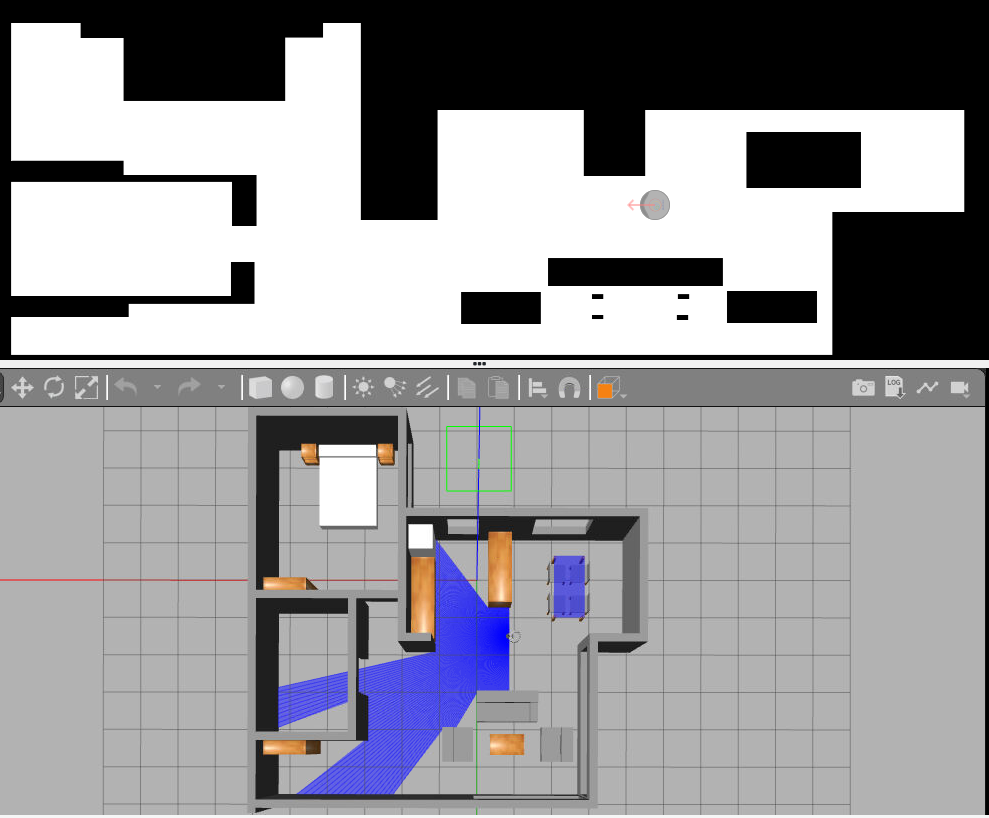
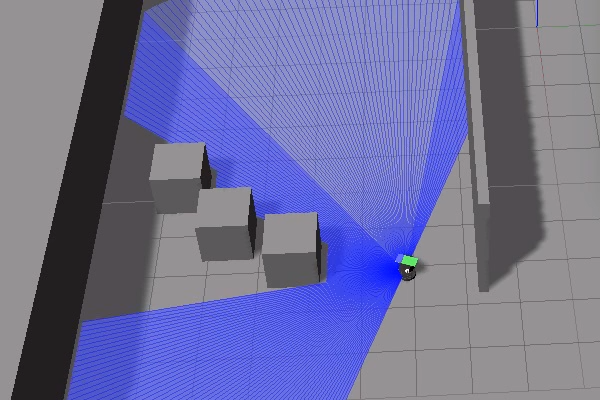
Robot self-localization using particle filter and laser sensor
Navigation algorithm for an autonomous vacuum.
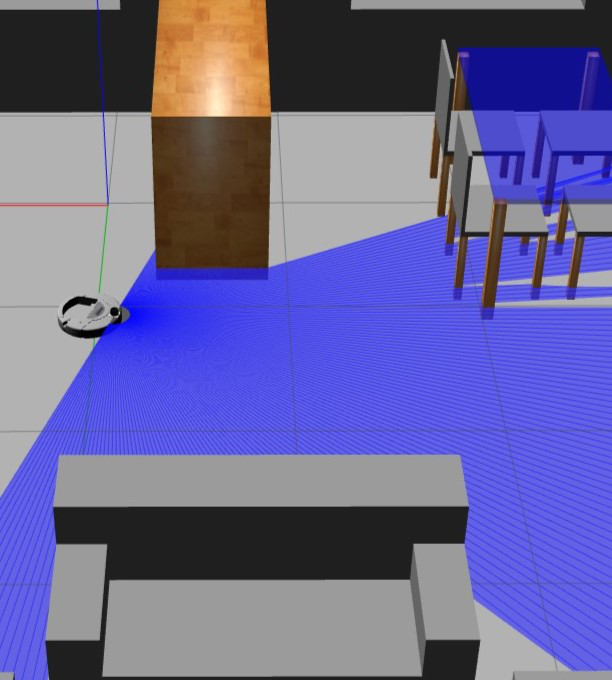
Follow a Person using a real TurtleBot2 robot with Deep Learning

Follow a Person in a hospital gazebo world using Deep Learning
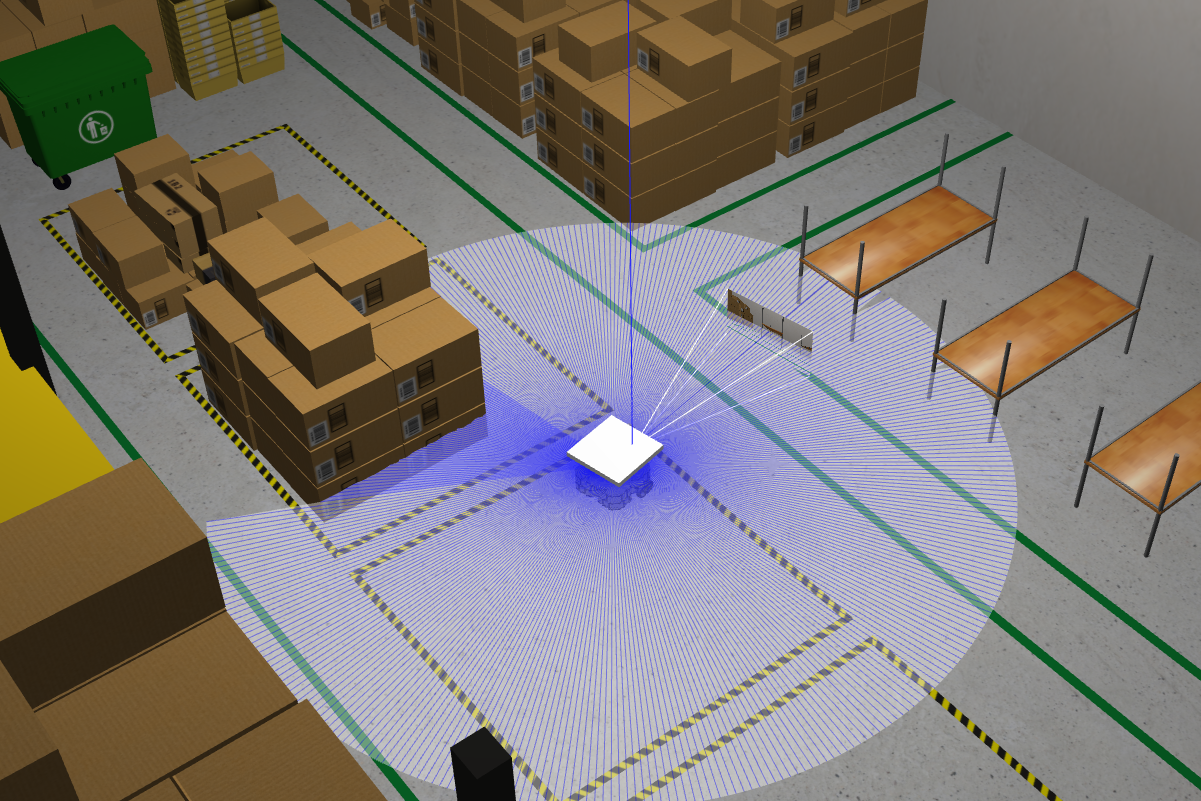
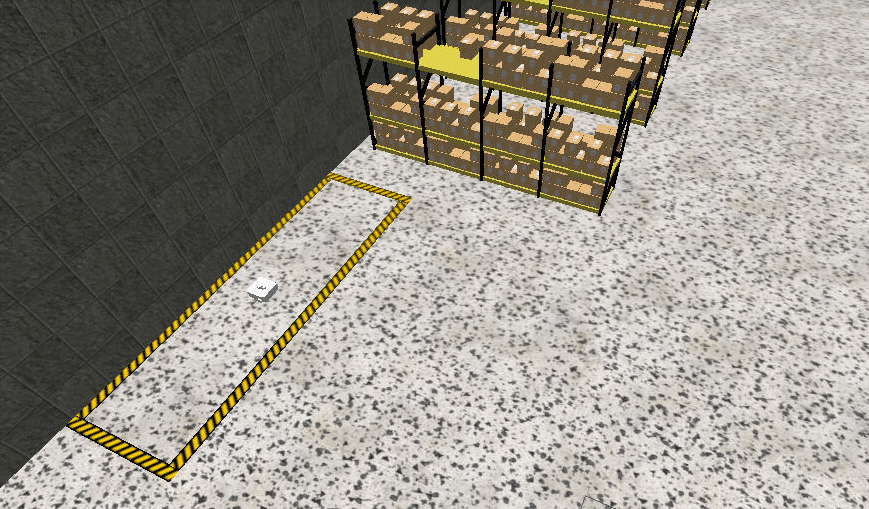
Autonomous navigation and pick-and-place logic in ROS2
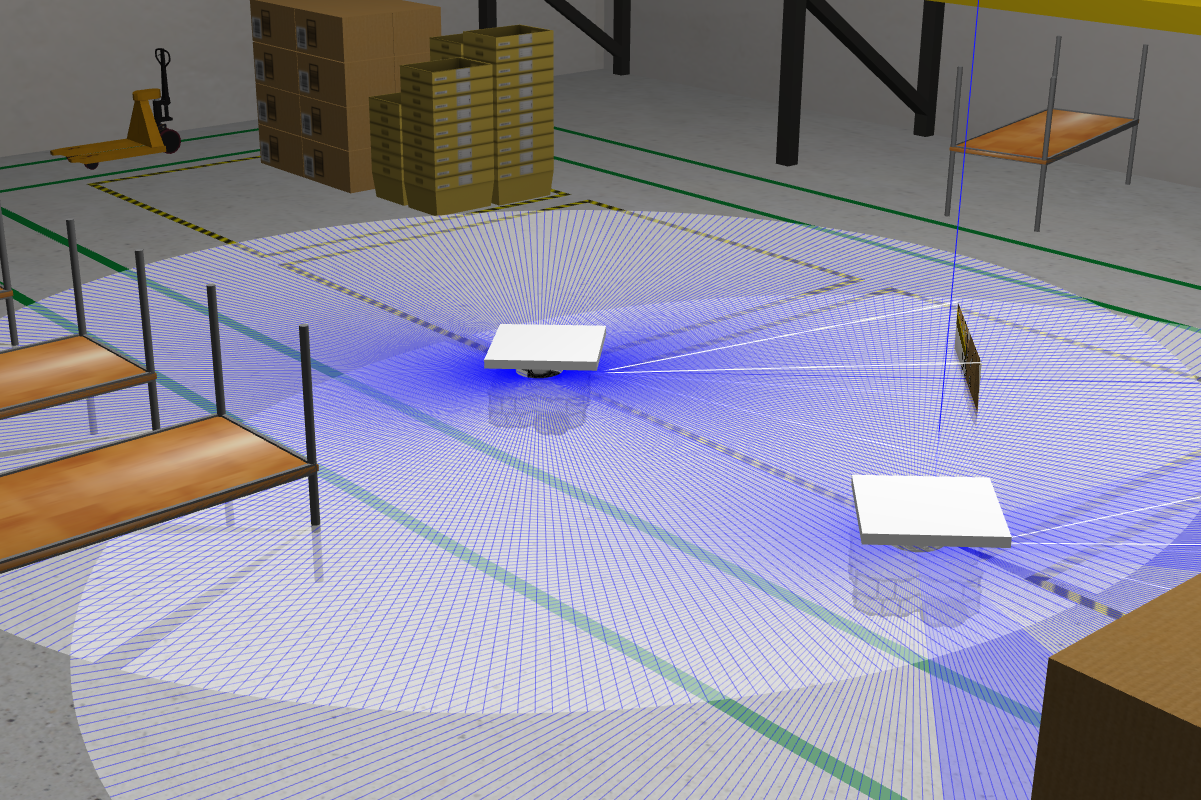
Multi robot warehouse planning in ROS2
Basic behaviour of bump-spin using a finite state machine

Robot self-localization using particle filter and laser sensor

Follow a Person using a real TurtleBot2 robot with Deep Learning
Path planning using visibility graph algorithm
Path planning using Rapidly-exploring Random Tree algorithm

Geometric map building using laser line segment extraction