Projects
Our (international) community mainly works on three lines inside Robotics and Computer Vision:

Robotics Education
RoboticsAcademy is an open source collection of exercises to learn robotics in a practical way. Programmed in Python, Gazebo simulator and ROS middleware are used.
AI driven Robotics
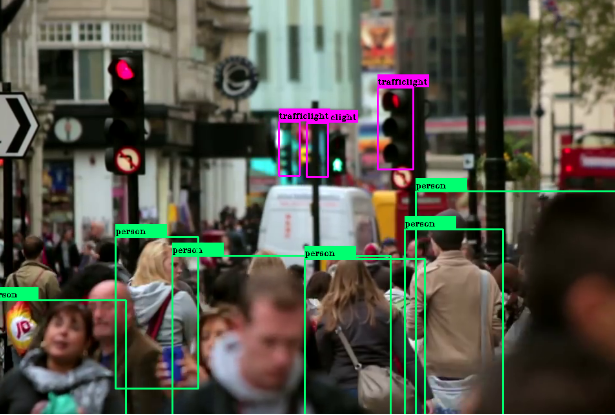
DeepLearning for control, Reinforcement Learning for control, Deeplearnig for visual object detection…

Robot Programming Tools
BT Studio (for BehaviorTree based applications), VisualCircuit (visual robot programming), FPGA-Robotics (robot programming in Verilog), dockerized RoboticsBackend…
Previous lines and projects
- Drones
- Visual SLAM
- People Tracking
- TrafficMonitor
- Home Automation
- Industrial AGVs
- Robot Navigation
- Robot Localization
- Robot Maps
- Robot Vision and Attention
- Computer Vision
- Software Architecture for Robotics