


Projects
In several areas: robot programming tools, AI driven Robotics, Education, drones…


Community
Who we are. Join us contributing in some development, testing, integrating, writting documentation or doing research.
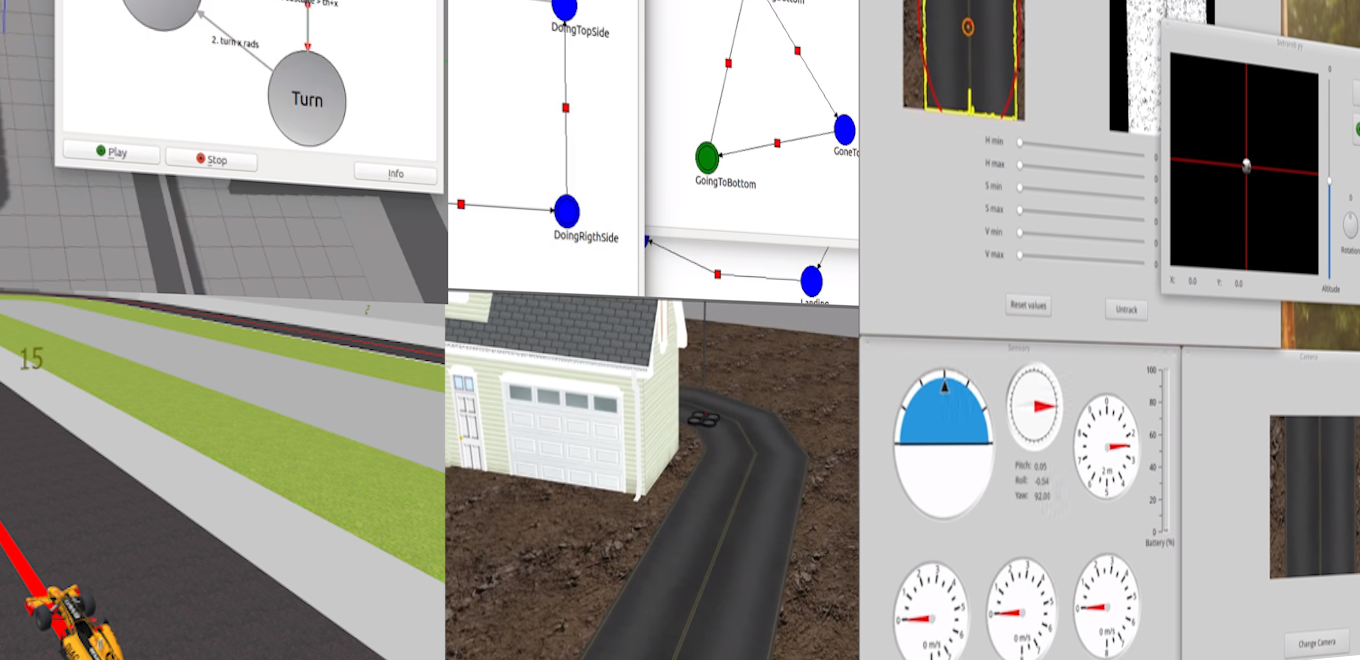
Currently robotics applications are typically distributed, made up of a collection of concurrent asynchronous components which communicate using some middleware. Building robotics applications is a complex task. Integrating existing software pieces and using several tools may increase the software robustness and shorten the development time. JdeRobot toolkit provides several tools, resources, libraries and reusable nodes for Robotics, Artificial Intelligence and Computer Vision applications.
We love open source software. All our software is ROS friendly. It has been developed mainly in Python, C++ and even JavaScript. Our mission is threefold: develop useful open source robotics software, foster robotics education worldwide, and also do some research in robotics.
We are registered as non-profit organization in Spain Ref.#615800. Our international community mainly works on three areas:
| Development Areas | Products |
|---|---|
| Robot Programming Tools | Unibotics, our online website for robot programming |
| BT-Studio, for development of BehaviorTree-based robotics applications | |
| VisualCircuit, visual robot programming using connected blocks and wires | |
| FPGA-robotics toolchain, design your robot intelligence in Verilog | |
| Robotics Education | Robotics-Academy, offline learning platform for engineering students |
| AI driven Robotics | Autonomous Driving with Imitation Learning and Reinforcement Learning |
| BehaviorMetrics tool for evaluation of end2end robot control models | |
| DetectionMetrics tool for evaluation of visual object detection models |
News
Published research papers
- (2024) Behavior Metrics: An Open-Source Assessment Tool for Autonomous Driving Tasks. Sergio Paniego, Roberto Calvo-Palomino, José M. Cañas. SoftwareX, Volume 26, Elsevier, 2024. DOI: https://doi.org/10.1016/j.softx.2024.101702
- (2024) Model Optimization in Deep Learning based Robot Control for Autonomous Driving. Sergio Paniego, Nikhil Paliwal, José M. Cañas. IEEE Robotics and Automation Letters (RA-L), Volume 9, Issue 1, Pages 715-722, 2024. DOI: https://doi.org/10.1109/LRA.2023.3336244
- (2023) Unibotics: open ROS-based online framework for practical learning of Robotics in higher education. David Roldán-Álvarez, José M. Cañas, David Valladares, Pedro Arias-Perez, Sakshay Mahna. Multimedia Tools and Applications, Springer 2023. DOI: https://doi.org/10.1007/s11042-023-17514-z
- (2023) Vision-based robotics using open FPGAs. Felipe Machado, Rubén Nieto, Jesus Fernández-Conde, David Lobato, José M. Cañas. Microprocessors and Microsystems, Volume 103, November 2023, 104974, Elsevier 2023. DOI:https://doi.org/10.1016/j.micpro.2023.104974
- (2022) Open Source Assessment of Deep Learning Visual Object Detection. Sergio Paniego, Vinay Sharma, José Marı́a Cañas. Sensors 2022, 22(12), 4575; MDPI. DOI: https://doi.org/10.3390/s22124575
License
 JdeRobot is open source. Its code is licensed under GPL v3.
JdeRobot is open source. Its code is licensed under GPL v3. All the documentation of JdeRobot software is licensed under Creative Commons by-sa
All the documentation of JdeRobot software is licensed under Creative Commons by-sa
Sponsors


