Marker Based Visual Loc
Goal
The goal of this exercise is to estimate the position and orientation (pose) of a robot in a 2D space by detecting and analyzing visual markers, specifically AprilTags. This process involves using computer vision to identify the tags in the robot’s environment and mathematical methods to derive its relative pose to the detected tags.
The green robot represents the real position. The blue robot represents the position from the odometry (with noise). The red robot represents the user estimated position.
Frequency API
Python
import Frequency- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency.tick(ideal_rate)- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
C++
#include "Frequency.hpp"- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency freq = Frequency();- to instanciate the Frequency class.freq.tick(ideal_rate);- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
Robot API
This exercise now supports ROS 2-direct implementation in addition to the original HAL-based approach. Below you’ll find the details for both options.
HAL-based Implementation
Python
import HAL- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).import WebGUI- to import the WebGUI (Web Graphical User Interface) library class. This class contains the functions used to view the debugging information, like image widgets.HAL.getImage()- to get the image.WebGUI.showImage()- allows you to view an image with relevant information that can be used for debugging.WebGUI.showEstimatedPose((x, y, yaw))- allows you to view your estimated position in the map.HAL.setV()- to set the linear speed.HAL.setW()- to set the angular velocity.HAL.getOdom().x- to get the approximated X coordinate of the robot (with noise).HAL.getOdom().y- to get the approximated XY coordinate of the robot (with noise).HAL.getOdom().yaw- to get the approximated orientation position of the robot (with noise).HAL.getLaserData()- It allows to obtain the data of the laser sensor, which consists of 180 pairs of values (0-180º, distance in meters).
C++
#include "HAL.hpp"- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).#include "WebGUI.hpp"- to import the WebGUI (Web Graphical User Interface) library class. This class contains the functions used to view the debugging information, like image widgets.HAL::set_v(velocity);- sets the linear velocity of the robot. The input is afloat. Returnsvoid.HAL::set_w(velocity);- sets the angular velocity of the robot. The input is afloat. Returnsvoid.HAL::get_pose3d();- returns the current ground-truth robot pose as aHAL::Pose3d.HAL::get_pose3d().x;- gets the robot x position in world coordinates (double).HAL::get_pose3d().y;- gets the robot y position in world coordinates (double).HAL::get_pose3d().yaw;- gets the robot orientation around the vertical axis in world coordinates (double).HAL::get_odom();- returns the noisy odometry pose as aHAL::Pose3d.HAL::get_odom().x;- gets the noisy odometry x position (double).HAL::get_odom().y;- gets the noisy odometry y position (double).HAL::get_odom().yaw;- gets the noisy odometry orientation around the vertical axis (double).HAL::get_image();- returns the latest camera image as acv::Mat.HAL::get_laser_data();- returns the laser sensor data as aHAL::LaserData.HAL::get_laser_data().values;- contains the laser distance readings as astd::vector<float>.HAL::get_laser_data().minAngle;- minimum laser angle (double).HAL::get_laser_data().maxAngle;- maximum laser angle (double).HAL::get_laser_data().minRange;- minimum valid laser range (double).HAL::get_laser_data().maxRange;- maximum valid laser range (double).HAL::get_bumper_data();- returns the bumper sensor data as aHAL::BumperData.HAL::get_bumper_data().state;- gets the bumper state (int).HAL::get_bumper_data().bumper;- gets the bumper identifier (int).WebGUI::show_image(image);- displays a debug image in the WebGUI. The input must be acv::Mat. Returnsvoid.WebGUI::show_estimated_pose(pose);- displays the user-estimated robot pose in the WebGUI. The input must be astd::tuple<double, double, double>containing(x, y, yaw). Returnsvoid.
In order to use the HAL-based controls you must include the following lines:
#include "HAL.hpp"
#include "WebGUI.hpp"
#include "Frequency.hpp"
void exercise() {
Frequency freq = Frequency();
// Enter sequential code!
while (true)
{
// Enter iterative code!
freq.tick();
}
}
ROS 2-direct Implementation
Use standard ROS 2 topics for direct communication with the simulation.
-
/turtlebot3/cmd_vel- Publish to this topic to set both linear and angular velocities. Message type:geometry_msgs/msg/Twist -
/turtlebot3/odom- Subscribe to this topic to receive the robot ground-truth odometry. Message type:nav_msgs/msg/Odometry -
/turtlebot3/odom_noisy- Subscribe to this topic to receive the noisy odometry. Message type:nav_msgs/msg/Odometry -
/turtlebot3/laser/scan- Subscribe to this topic to receive laser data. Message type:sensor_msgs/msg/LaserScan -
/turtlebot3/camera/image_raw- Subscribe to this topic to receive the camera image. Message type:sensor_msgs/msg/Image
For WebGUI debugging:
-
/webgui/estimated_pose- Publish to this topic to display the estimated robot pose in the WebGUI. Message type:geometry_msgs/msg/PoseStamped
QoS:TRANSIENT_LOCAL, depth1 -
/webgui/image_debug- Publish to this topic to display a debug image in the WebGUI. Message type:sensor_msgs/msg/Image
Python
Note: Ensure this import is included in your script to access the Web GUI functionalities.
import WebGUI - to enable the Web GUI for visualizing camera images.
To have frequency control you need to use standard ROS 2 mechanisms to manage loop timing:
rclpy.spin()- Event-driven execution using callbacks.rclpy.spin_once()- Single-step processing, often with custom timers.rclpy.Rate()- Loop-based frequency control.
Note
WebGUI already initializes rclpy internally, so this should be taken into account when building a direct ROS 2 solution.
C++
In order to use direct ros controls you must include the following lines:
#ifndef USER_NODE
#define USER_NODE
#include "rclcpp/rclcpp.hpp"
class UserNode : public rclcpp::Node {
// Your class
};
#endif
You must define USER_NODE and a UserNode node class.
To have frequency control you may use a timer and a control function as follows:
UserNode() : Node("user_node")
{
// More subscribers and publishers
timer_ = create_wall_timer(100ms, std::bind(&UserNode::control_cycle, this));
};
// More Code
void control_cycle(){
// Your function
};
Parse laser data
Here is an example of how to parse the laser data:
import math
import numpy as np
def parse_laser_data(laser_data):
""" Parses the LaserData object and returns a tuple with two lists:
1. List of polar coordinates, with (distance, angle) tuples,
where the angle is zero at the front of the robot and increases to the left.
2. List of cartesian (x, y) coordinates, following the ref. system noted below.
Note: The list of laser values MUST NOT BE EMPTY.
"""
laser_polar = [] # Laser data in polar coordinates (dist, angle)
laser_xy = [] # Laser data in cartesian coordinates (x, y)
for i in range(180):
# i contains the index of the laser ray, which starts at the robot's right
# The laser has a resolution of 1 ray / degree
#
# (i=90)
# ^
# |x
# y |
# (i=180) <----R (i=0)
# Extract the distance at index i
dist = laser_data.values[i]
# The final angle is centered (zeroed) at the front of the robot.
angle = math.radians(i - 90)
laser_polar += [(dist, angle)]
# Compute x, y coordinates from distance and angle
x = dist * math.cos(angle)
y = dist * math.sin(angle)
laser_xy += [(x, y)]
return laser_polar, laser_xy
# Usage
laser_data = HAL.getLaserData()
if len(laser_data.values) > 0:
laser_polar, laser_xy = parse_laser_data(laser_data)
Load tags position
import yaml
from pathlib import Path
conf = yaml.safe_load(
Path("/resources/exercises/marker_visual_loc/apriltags_poses.yaml").read_text()
)
tags = conf["tags"]
The content of the yaml file has this structure:
tags:
tag_0:
position: [1.75, -3.535, 0.8, -1.57079]
Being the position [X, Y, Z, Yaw] of the center of the tag.
Theory
Visual Markers: AprilTags
AprilTags are fiducial markers similar to QR codes but designed for robust detection and pose estimation. They consist of a binary grid with a unique pattern that encodes an identifier. They are ideal for robotics applications due to:
- Their high detection reliability.
- Robustness to noise, partial occlusion, and perspective distortions.
- Easy decoding to obtain a unique ID and retrieve the tag’s known position in the environment.
Example code for apriltags detection:
import WebGUI
import HAL
import pyapriltags
import cv2
detector = pyapriltags.Detector(searchpath=["apriltags"], families="tag36h11")
while True:
print("[INFO] loading image...")
image = HAL.getImage()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
print("[INFO] detecting AprilTags...")
results = detector.detect(gray)
print("[INFO] {} total AprilTags detected".format(len(results)))
# loop over the AprilTag detection results
for r in results:
# extract the bounding box (x, y)-coordinates for the AprilTag
# and convert each of the (x, y)-coordinate pairs to integers
(ptA, ptB, ptC, ptD) = r.corners
ptB = (int(ptB[0]), int(ptB[1]))
ptC = (int(ptC[0]), int(ptC[1]))
ptD = (int(ptD[0]), int(ptD[1]))
ptA = (int(ptA[0]), int(ptA[1]))
# draw the bounding box of the AprilTag detection
cv2.line(image, ptA, ptB, (0, 255, 0), 2)
cv2.line(image, ptB, ptC, (0, 255, 0), 2)
cv2.line(image, ptC, ptD, (0, 255, 0), 2)
cv2.line(image, ptD, ptA, (0, 255, 0), 2)
# draw the center (x, y)-coordinates of the AprilTag
(cX, cY) = (int(r.center[0]), int(r.center[1]))
cv2.circle(image, (cX, cY), 5, (0, 0, 255), -1)
# draw the tag family on the image
tagFamily = r.tag_family.decode("utf-8")
cv2.putText(
image,
tagFamily,
(ptA[0], ptA[1] - 15),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(0, 255, 0),
2,
)
print("[INFO] tag family: {}".format(tagFamily))
WebGUI.showImage(image)
Camera Model and Calibration
Before detecting AprilTags, the camera used to observe the environment must be calibrated. Camera calibration provides intrinsic parameters like focal length and optical center, which are critical for accurate pose estimation. A camera model is typically represented using the pinhole camera model with distortion corrections.
The intrinsic parameters are used in:
Projection Matrix (P): Converts 3D world coordinates to 2D image coordinates.
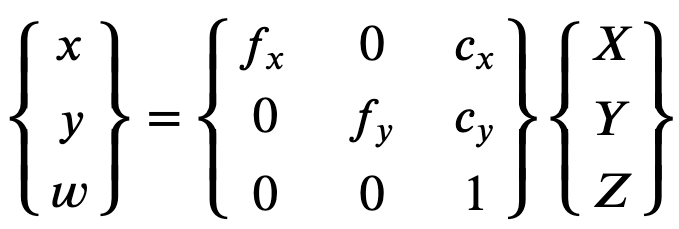
You can use the following code to define the default parameters:
size = image.shape
focal_length = size[1]
center = (size[1] / 2, size[0] / 2)
matrix_camera = np.array(
[[focal_length, 0, center[0]], [0, focal_length, center[1]], [0, 0, 1]],
dtype="double",
)
dist_coeffs = np.zeros((4, 1))
AprilTag Detection
The detection process includes:
- Preprocessing: Filtering the image and identifying regions likely to contain tags.
- Decoding: Analyzing the binary pattern to extract the tag’s unique ID.
- Pose Estimation: Computing the 6-DoF pose of the tag with respect to the camera.
The apriltags are set at 0.8 meters in height and have a size of 0.3 x 0.3 meters (the black part is 0.24 x 0.24 meters).
PnP (Perspective-n-Point)
Given the 3D coordinates of the tag and their corresponding 2D image points (without z), the robot’s pose can be estimated using algorithms like Direct Linear Transformation (DLT) or iterative methods (e.g., Levenberg-Marquardt).
Here is the documentation of PnP in OpenCV.
Rotation and Translation matrix
The rotation and translation matrixes can be extracted from the sdf files that describe the turtlebot 3 waffle robot.
More Resources
You may find interesting the following resources:
Videos
This is a demostrative solution on unibotics.org
Contributors
- Contributors: Jose María Cañas, David Duro, Javier Izquierdo.
References
https://pyimagesearch.com/2020/11/02/apriltag-with-python/ https://en.wikipedia.org/wiki/Perspective-n-Point https://april.eecs.umich.edu/software/apriltag https://ftc-docs.firstinspires.org/en/latest/apriltag/vision_portal/apriltag_pose/apriltag-pose.html