Bump and Go
Goal
The intention of this excersise is to program a basic behavior of bump-spin using a Finite State Machine. For that, we will use the VisualStates tool, that allows you to create your own states machine in an intuitive way.
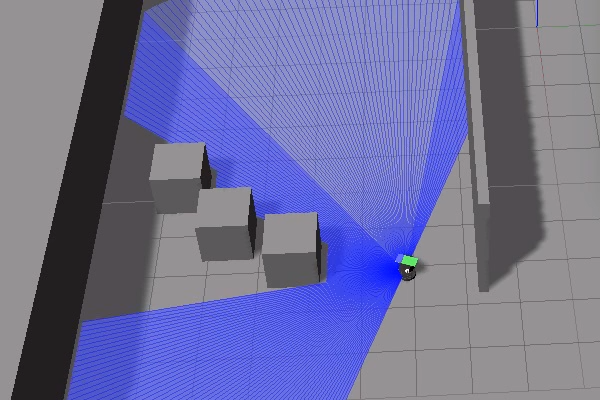
There is a Kobuki robot inside a labyrinth or scenario. The robot will go front until it gets close to an obstacle. The it will go back, turn a random angle and go front again repeating the process. This exercise aims to show the power of automata when building robot behavior.
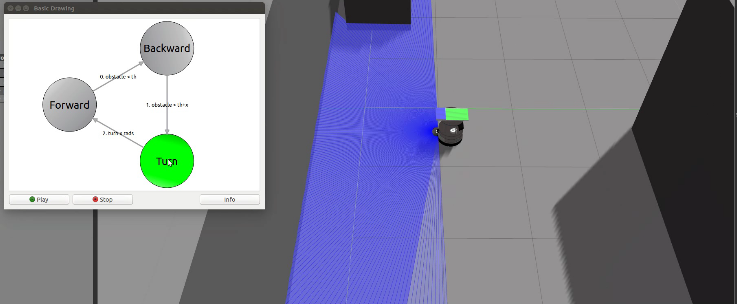
Using the JdeRobot VisualStates tool the solution works like this. The tool’s detailed manual, installation instructions, etc. can be found here.