Pick and Place
Goal
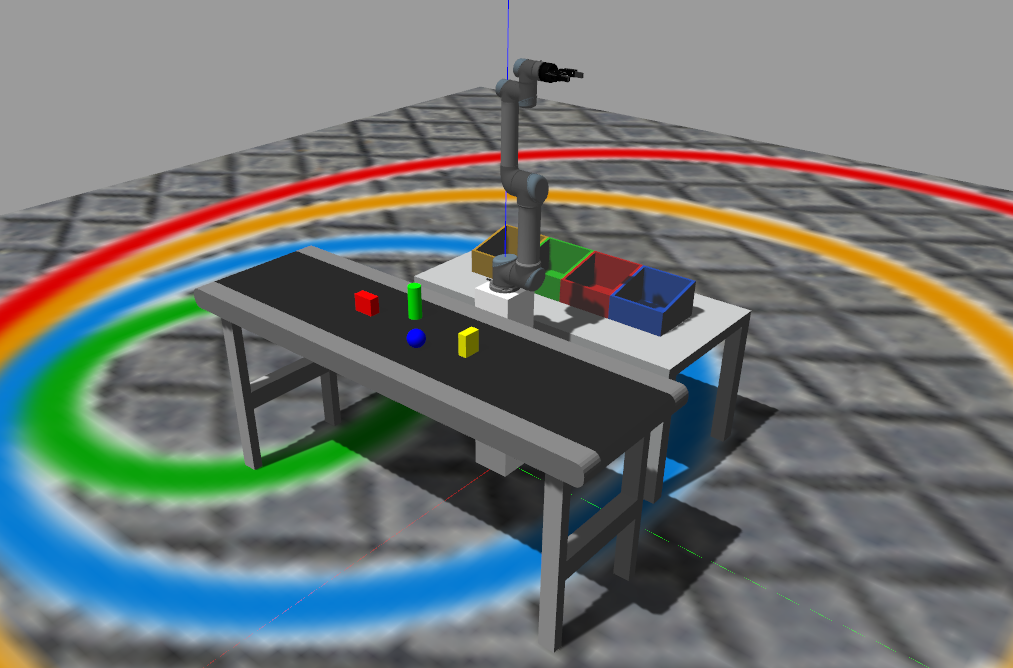
The goal of this exercise is to learn the underlying infrastructure of Industrial Robot exercises(ROS + MoveIt + our industrial robotics HAL API) and get familiar with the key components needed for more complex exercises by completing the task of pick and place multiple objects and classify them by color or shape.
Frequency API
Python
import Frequency- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency.tick(ideal_rate)- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
C++
#include "Frequency.hpp"- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency freq = Frequency();- to instanciate the Frequency class.freq.tick(ideal_rate);- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
Robot API
HAL API for Gazebo 11 (Classic).
To use this HAL API, you need to import the HAL module:
import HAL
Direct Kinematics
HAL.MoveAbsJ(absolute_joints, rel_speed, wait_time)- Moves the robot to the given angular position for each joint (in degrees), at a given relative speed in the range [0-1], adding a final delay in seconds.
HAL.MoveSingleJ("jointX", value_in_deg, rel_speed, wait_time)- Moves the joint X [0 to 6] of the robot to the given angle value (in degrees), at a given relative speed in the range [0-1], adding a final delay in seconds.
Inverse Kinematics
Using absolute poses
HAL.MoveJoint(absolute_XYZ, absolute_YPR, rel_speed, wait_time)- Moves the robot Tool Center Point (TCP) to an absolute (X,Y,Z) pose with an absolute orientation (in degrees) of (Yaw,Pitch,Roll), at a given relative speed in the range [0-1], adding a final delay in seconds. The robot will move at constant rotational speeds in each joint, resulting in a non-linear trajectory
HAL.MoveLinear (absolute_XYZ, absolute_YPR, rel_speed, wait_time)- Moves the robot TCP to an absolute (X,Y,Z) pose with an absolute orientation (in degrees) of (Yaw,Pitch,Roll) in a linear trajectory, at a given relative speed in the range [0-1], adding a final delay in seconds.
Using relative XYZ or YPR increments
HAL.MoveRelLinear(increment_XYZ, rel_speed, wait_time)- Moves the robot TCP pose in a linear trajectory by the distances given in increment_XYZ argument, at a given relative speed in the range [0-1], adding a final delay in seconds. The tool orientation is not changed.
HAL.MoveRelReor (increment_YPR, rel_speed, wait_time)- Reorients the robot TCP by the angular increments given in increment_YPR argument (in degrees), at a given relative speed in the range [0-1], adding a final delay in seconds. The TCP (x,y,z) stay fixed.
Gripper usage
HAL.GripperSet(percentage_closure, wait_time)- Controls the two-finger gripper opening.
- 0 → fully open
- 100 → fully closed
- When the gripper is opened (typically ≤ 5%), any attached object is automatically detached.
- Controls the two-finger gripper opening.
HAL.attach(object_name)- Attaches the specified object to the gripper using the Gazebo LinkAttacher ROS2 service.
- The object must be one of the predefined simulation objects.
HAL.dettach()- Detaches the currently attached object from the gripper using the LinkAttacher service.
- If no object is attached, the function does nothing.
Notes:- Only one object can be attached at a time.
- The attach/detach operations rely on ROS2 service calls and are not instantaneous.
Argument examples
Example of data targets for MoveAbsJ (angular position for each joint, in deg)
absj_10 = [0, -90, 45, -135, -90, 0]
absj_20 = [-45, -90, 90, -90, -90, 90]
absj_30 = [20, -90, 45, -45, -90, 0]
Examples of absolute XYZ poses for MoveJoint and MoveLinear (in meters, from the world frame)
pose_10 = [0.5, 0, 1.3]
pose_20 = [0, 0.5, 1.3]
Examples of absolute YPR angular poses or MoveJoint and MoveLinear (in degrees)
YPR_10 = [0, 90, 90]
YPR_20 = [0, 90, 0]
Examples of Cartesian increments for relative MoveRelLinear, [Ax,Ay,Az] in meters)
increment_10 = [0.3, 0.1, -0.2]
increment_20 = [-0.4, -0.1, 0.4]
HAL API for Gazebo Harmonic.
To use this HAL API, you need to import the HAL_Harmonic module:
import HAL_Harmonic
Direct Kinematics
HAL.MoveAbsJ(joints_deg, speed, wait_time)- Moves the robot to the given angular position for each joint (in degrees), at a given relative speed in the range [0-1], adding a final delay in seconds.
HAL.MoveSingleJ("jointX", value_in_deg, rel_speed, wait_time)- Moves a single joint by a relative angular increment (in degrees), at a given relative speed in the range [0-1], adding a final delay in seconds.s
Inverse Kinematics
Using absolute poses
HAL.MoveJoint(abs_xyz, abs_ypr, speed, wait_time)- Moves the robot Tool Center Point (TCP) to an absolute (X,Y,Z) pose with an absolute orientation (Roll,Pitch,Yaw in degrees), at a given relative speed in the range [0-1], adding a final delay in seconds.
HAL.MoveLinear (absolute_XYZ, absolute_YPR, rel_speed, wait_time)- Moves the robot TCP to an absolute (X,Y,Z) pose with an absolute orientation (Roll,Pitch,Yaw in degrees) following a linear trajectory, at a given relative speed in the range [0-1], adding a final delay in seconds.
Using relative XYZ or YPR increments
HAL.MoveRelLinear(relative_xyz, speed, wait_time)- Moves the robot TCP in Cartesian space by the given relative displacement (in meters), maintaining orientation.
HAL.MoveRelReor (relative_rpy, speed, wait_time)- Reorients the robot TCP by relative angular increments (Roll,Pitch,Yaw in degrees), keeping the TCP position fixed.
Gripper usage
In Gazebo Harmonic, the gripper is controlled through the joint trajectory controller. Object grasping and releasing are handled automatically through a custom contact-based attachment system integrated into Gazebo.
HAL.GripperSet(percentage_closure, wait_time)
Closes or opens the two-finger gripper to the closing percentage given in the first argument, adding a final delay in seconds.
- A
percentage_closureof 100 means fully closed. - A
percentage_closureof 0 means fully opened.
When the gripper starts closing (percentage_closure > 5), automatic attachment is enabled. If one of the graspable objects is detected in contact with the gripper fingers, the object is automatically attached to the gripper.
When the gripper is opened (percentage_closure <= 5), automatic attachment is disabled and any currently attached object is automatically detached.
Graspable Objects
The following objects can be automatically grasped and attached:
blue_ballgreen_cylinderyellow_boxred_box
No manual attach or detach commands are required. Grasping and releasing are performed automatically based on gripper state and contact detection.
HAL API for C++
#include "HAL.hpp"- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).
Direct Kinematics
HAL::MoveAbsJ(joints, speed, wait_time);- Moves the robot to the given angular position for each joint.jointsisstd::array<double, 6>in degrees,speedin [0,1],wait_timein seconds.HAL::MoveSingleJ(joint_number, relative_angle, speed, wait_time);- Moves a single joint by a relative angular increment.joint_numberin [1,6], angle in degrees.
Inverse Kinematics
HAL::MoveJoint(xyz, ypr, speed, wait_time);- Moves the TCP to an absolute Cartesian pose.xyzisstd::array<double, 3>in metres,yprin degrees.HAL::MoveLinear(xyz, ypr, speed, wait_time);- Moves the TCP in a linear trajectory to an absolute Cartesian pose.xyzin metres,yprin degrees.HAL::MoveRelLinear(xyz, speed, wait_time);- Moves the TCP by a relative Cartesian increment.xyzisstd::array<double, 3>in metres.HAL::MoveRelReor(ypr, speed, wait_time);- Reorients the TCP by relative angular increments.yprisstd::array<double, 3>in degrees.
Gripper
HAL::GripperSet(relative_closure, wait_time);- Controls the gripper.relative_closurein [0,100] (0 = fully open, 100 = fully closed). When closing (relative_closure> 5), contact-based automatic attachment is enabled; when opening (relative_closure<= 5), the attached object is automatically released.
In order to use the HAL-based controls you must include the following lines:
#include "HAL.hpp"
#include "Frequency.hpp"
void exercise() {
Frequency freq = Frequency();
// Enter sequential code!
while (true)
{
// Enter iterative code!
freq.tick();
}
}
Argument examples
Example of data targets for MoveAbsJ (angular position for each joint, in deg)
absj_home = [0, -90, 70, -70, -90, 0]
Examples of absolute XYZ poses for MoveJoint (in meters, from the world frame)
aprox_yellow_box = [0.6, 0.3, 0.4]
aprox_yellow_target = [-0.4, -0.45, 0.4]
Examples of absolute YPR angular poses for MoveJoint (in degrees)
YPR_pick = [180, 0, -90]
YPR_place = [0, 90, 0]
Examples of Cartesian increments for relative MoveRelLinear, [Ax,Ay,Az] in meters
decrease_z_10 = [0, 0, -0.10]
decrease_z_15 = [0, 0, -0.15]
increase_z_20 = [0, 0, 0.20]
increase_z_25 = [0, 0, 0.25]
Where to insert and run the code?
In the launched webpage, type your code in the text editor and run it pressing the run button:
import HAL
# Enter sequential code here!
while True:
# Enter iterative code here!
Why does the robot sometimes cannot move to some desired pose?
The most possible reason is that your specified pose is unreachable for the robot arm, so MoveIt cannot plan a trajectory from current pose to desired pose in limited time. You will see such a warning when this problem happened:
Fail: ABORTED: No motion plan found. No execution attempted.
Object and Target lists, dimensions and poses
Gazebo 11 (Classic)
Object list. The four objects are located on a conveyor that is 1 m tall.
- yellow_box
- Size (l,w,h) = (7,5,10) cm
- Pose (x,y) = (0.6,0.3) m
- red_box
- Size (l,w,h) = (5,10,8) cm
- Pose (x,y) = (0.6,-0.3) m
- blue_ball
- Size (r) = (4) cm
- Pose (x,y) = (0.7, 0.1) m
- green_cylinder
- Size (r,h) = (4,15) cm
- Pose (x,y) = (0.5, -0.1) m
Target list. The four targets are located on a table that is 0.8 m tall.
- red_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,0.15) m
- green_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,-0.15) m
- blue_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,0.45) m
- yellow_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,-0.45) m
Gazebo Harmonic
Object list. The four objects are located on a conveyor that is 1 m tall.
Object dimensions and positions are the same as in the Gazebo Classic version.
- yellow_box
- Size (l,w,h) = (7,5,10) cm
- Pose (x,y) = (0.6,0.3) m
- red_box
- Size (l,w,h) = (5,10,8) cm
- Pose (x,y) = (0.6,-0.3) m
- blue_sphere
- Size (r) = (4) cm
- Pose (x,y) = (0.7, 0.1) m
- green_cylinder
- Size (r,h) = (4,15) cm
- Pose (x,y) = (0.5, -0.1) m
Target list. The four targets are located on a table that is 0.8 m tall.
Target dimensions and positions are identical to the Gazebo Classic version.
- red_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,0.15) m
- green_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,-0.15) m
- blue_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,0.45) m
- yellow_target
- Size (l,w,h) = (36,30,12) cm
- Pose (x,y) = (-0.6,-0.45) m
Hints
Relationship among ROS2, MoveIt2, Gazebo, JdeRobot provided API
- ROS(Robot Operating System) is a robotics middleware which contains a set of open source libraries for developing robot applications.
- MoveIt is an open source Motion Planning framework for industrial robot which integrates motion planning, collision checking, manipulation, 3D perception capabilities.
- Rviz is a 3D visualization tool for ROS. Many ROS topics can be visualized in Rviz, including the planning scene of MoveIt move group, but it does not contain any physics simulation capability.
- Gazebo is a physics simulator mainly use for robot simulation.
- The HAL API provided by JdeRobot Robotics Academy is based on the above tools and the IFRA Cranfield repositories (see Acknowledgements), so the user don’t need to learn all of them to start simulation of industrial robot manipulation.
Videos
Demonstration video of the solution
Acknowledgements
This exercise uses the excellent work of the IFRA Cranfield Group. Check out their repos at: IFRA-Cranfield (2023) ROS 2 Sim-to-Real Robot Control. URL: https://github.com/IFRA-Cranfield/ros2_SimRealRobotControl.