Autoparking
Goal
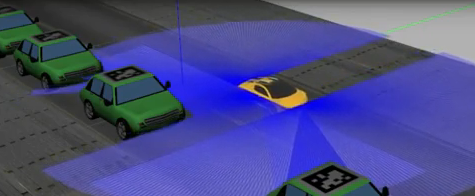
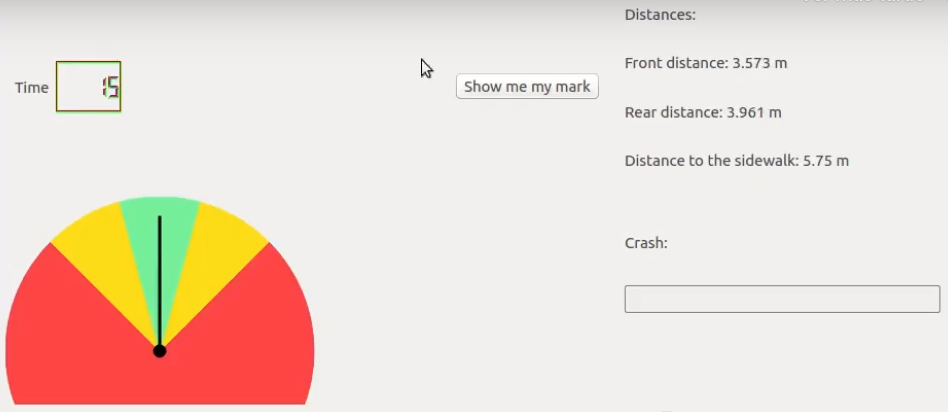
The objective of this exercise is to implement the logic of a navigation algorithm for an automated vehicle. The vehicle must find a parking space and park properly.
Frequency API
import Frequency- to import the Frequency library class. This class contains the tick function to regulate the execution rate.Frequency.tick(ideal_rate)- regulates the execution rate to the number of Hz specified. Defaults to 50 Hz.
Robot API
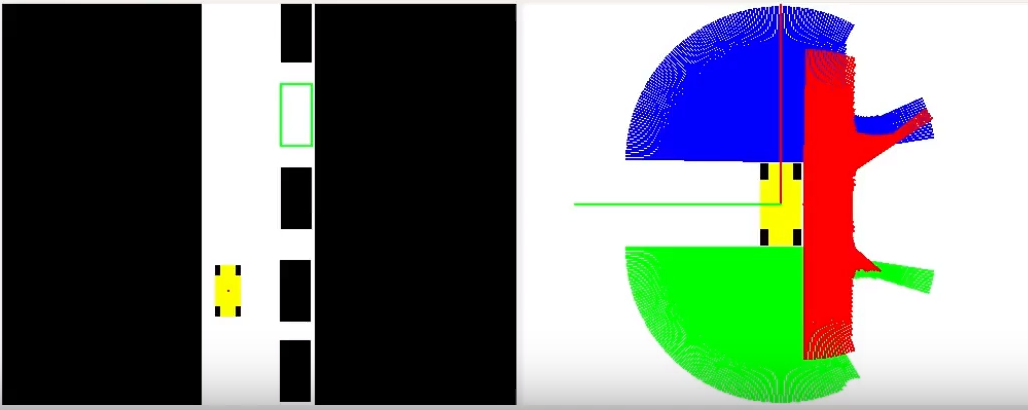
import HAL- to import the HAL (Hardware Abstraction Layer) library class. This class contains the functions that send and receive information to and from the Hardware (Gazebo).import WebGUI- to import the WebGUI (Web Graphical User Interface) library class. This class contains the functions used to view the debugging information, like image widgets.HAL.getPose3d()- to get all the position information.HAL.getPose3d().x- to get the position of the robot (x coordinate).HAL.getPose3d().y- to get the position of the robot (y coordinate).HAL.getPose3d().yaw- to get the orientation of the robot with regarding the mapHAL.getFrontLaserData()- to obtain the front laser sensor data. It is composed of 180 pairs of values: (0-180º distance in millimeters)HAL.getRightLaserData()- to obtain the right laser sensor data. It is composed of 180 pairs of values: (0-180º distance in millimeters)HAL.getBackLaserData()- to obtain the back laser sensor data. It is composed of 180 pairs of values: (0-180º distance in millimeters)HAL.setV()- to set the linear speed.HAL.setW()- to set the angular velocity.
Laser attributes
HAL.getFrontLaserData(), HAL.getRightLaserData() and HAL.getBackLaserData() returns an instance of a Class with the following attributes:
minAngle- Start angle of the scan [rad]maxAngle- End angle of the scan [rad]minRange- minimum range value [m]maxRange- maximum range value [m]values- A list of 180 measurements [m] (Note: values < minRange or > maxRange should be discarded)
Illustrations
Videos
Demonstrative video of the solution
Contributors
- Contributors: Vanessa Fernández Martínez, Javier Izquierdo.
- Maintained by Vanessa Fernández Martínez, Javier Izquierdo.