Remote Use
Instructions for using Robotics Backend
Minimum System Requirements
- CPU: A 4-cored processor.
- RAM: 2 gb RAM.
- Memory: 20 gb of disk space.
Linux Users
-
Download Docker (minimum version of docker-py: 5.0.3).
-
Pull the current distribution of Robotics Backend (currently version 4.6.18):
docker pull jderobot/robotics-backend:latest
-
In order to obtain optimal performance, Docker should be using multiple CPU cores. In case of Docker for Mac or Docker for Windows, the VM should be assigned a greater number of cores.
-
It is recommended to use the latest image. However, older distributions of Robotics Backend can be found here.
Windows Users
Windows users should choose WSL 2 backend Docker installation if possible, as it has better performance than Hyper-V.
-
Install WSL2. Here’s a link to the tutorial (minimum version of docker hub: 4.30.0).
-
Install Docker Desktop. Docker made an app for Windows users to adapt the user experience. You can download it from this link.
-
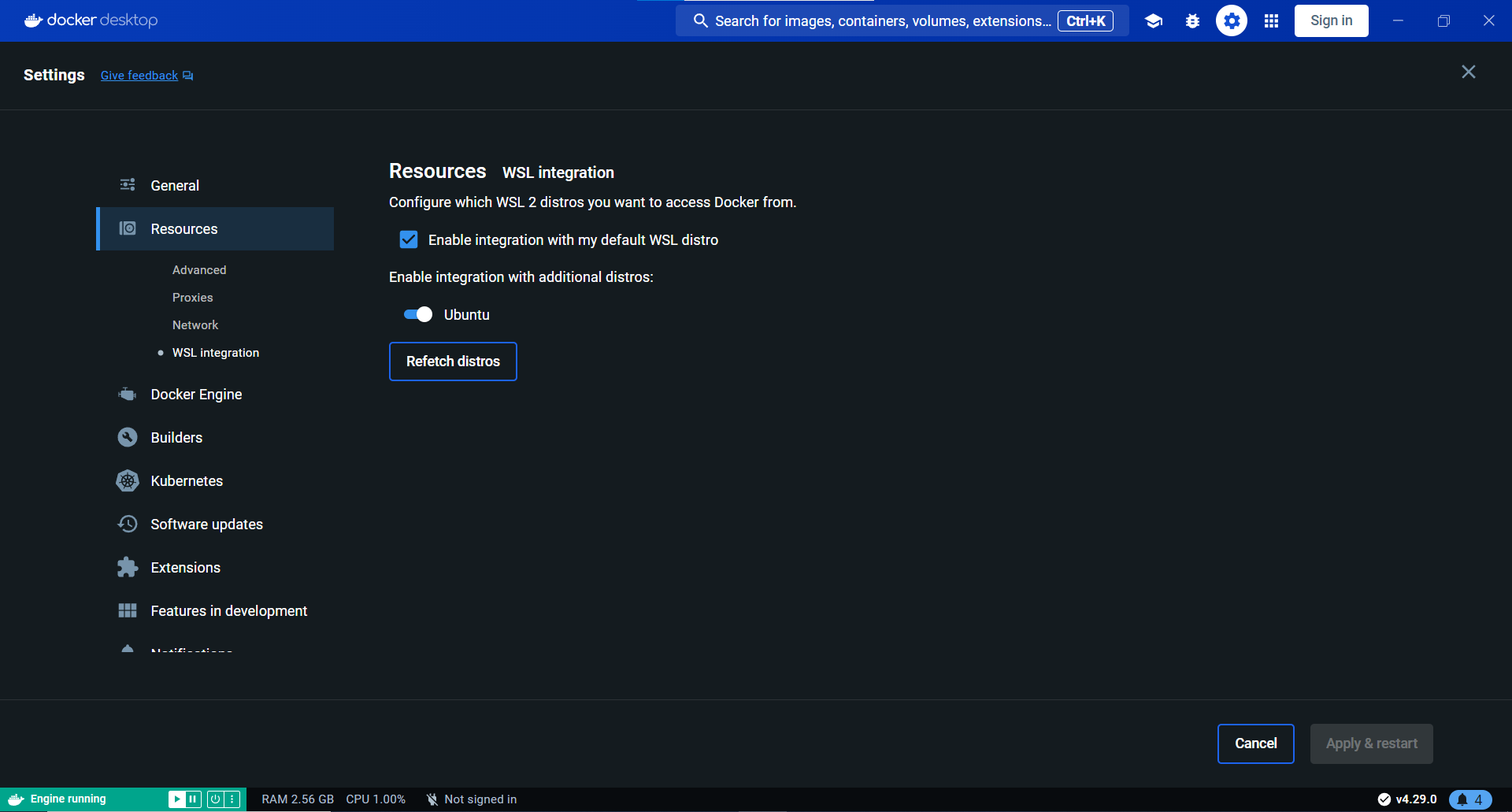
Enable Docker Desktop WSL integration: In order to wsl2 to recognise Docker, you need to enable it. For that, go to Docker Desktop -> Settings -> Resources -> WSL integration. Click on the check box and the slider.
-
Pull the current distribution of Robotics Backend (currently version 4.6.18):
docker pull jderobot/robotics-backend:latest
-
In order to obtain optimal performance, Docker should be using multiple CPU cores. In case of Docker for Mac or Docker for Windows, the VM should be assigned a greater number of cores.
-
It is recommended to use the latest image. However, older distributions of Robotics Backend can be found here.
MacOs (NOT TESTED!)
- Remember to add minium docker version to run a Bt Studio.
2. How to launch a Robotics Backend container?
- Start a new docker container of the image and keep it running in the background:
- The priority order is: NVIDIA -> Intel -> Only CPU
docker run --rm -it $(nvidia-smi >/dev/null 2>&1 && echo "--gpus all" || echo "") --device /dev/dri -p 6080:6080 -p 1108:1108 -p 7163:7163 jderobot/robotics-backend:latest
Advanced Instructions on Linux
-
NVIDIA: For NVIDIA GPUs, acceleration can be achieved by installing the nvidia-container-runtime package, and then running the auto command above.
-
Integrated GPU ```bash docker run –rm -it –device /dev/dri -p 6080:6080 -p 1108:1108 -p 7163:7163 jderobot/robotics-backend:latest
- **Only CPU:**
```bash
docker run --rm -it -p 6080:6080 -p 1108:1108 -p 7163:7163 jderobot/robotics-backend:latest
Windows
For Windows machines, acceleration can be achieved for NVIDIA GPUs if a valid CUDA installation is available. Useful docs for proper installation of WSL2 + CUDA + Docker Desktop:
Once these requirements are ready, you should be able to run Bt Studio with GPU acceleration as follows:
docker run --rm -it --gpus all -v /usr/lib/wsl:/usr/lib/wsl -e LD_LIBRARY_PATH=/usr/lib/wsl/lib --device /dev/dri -p 6080:6080 -p 1108:1108 -p 7163:7163 -p 7164:7164 --link academy_db jderobot/robotics-backend::latest
Tips for Docker
Make sure to remove the container if you have problems with the exercise not loading with the following commands.
- Locate the docker container used for Robotics Backend using
docker ps -a
- Remove that container using
docker rm CONTAINER_ID