Installation
Bt Studio supports Linux (Ubuntu 22.04, 24.04 and other distributions), MacOS and Windows.
1. Installation
The installation of ROS, Gazebo, etc. has been greatly simplified, as all the required dependencies are already pre-installed in the Robotics Backend.
Minimum System Requirements
- CPU: A 4-cored processor.
- RAM: 2 gb RAM.
- Memory: 20 gb of disk space.
Linux Users
-
Download Docker (minimum version of docker-py: 5.0.3).
-
Pull the current distribution of Bt Studio and of Bt Studio Database (currently version 0.8):
docker pull jderobot/bt-studio-database:latest
docker pull jderobot/bt-studio:latest
-
In order to obtain optimal performance, Docker should be using multiple CPU cores. In case of Docker for Mac or Docker for Windows, the VM should be assigned a greater number of cores.
-
It is recommended to use the latest image. However, older distributions of Bt Studio can be found here.
Windows Users
Windows users should choose WSL 2 backend Docker installation if possible, as it has better performance than Hyper-V.
-
Install WSL2. Here’s a link to the tutorial (minimum version of docker hub: 4.30.0).
-
Install Docker Desktop. Docker made an app for Windows users to adapt the user experience. You can download it from this link.
-
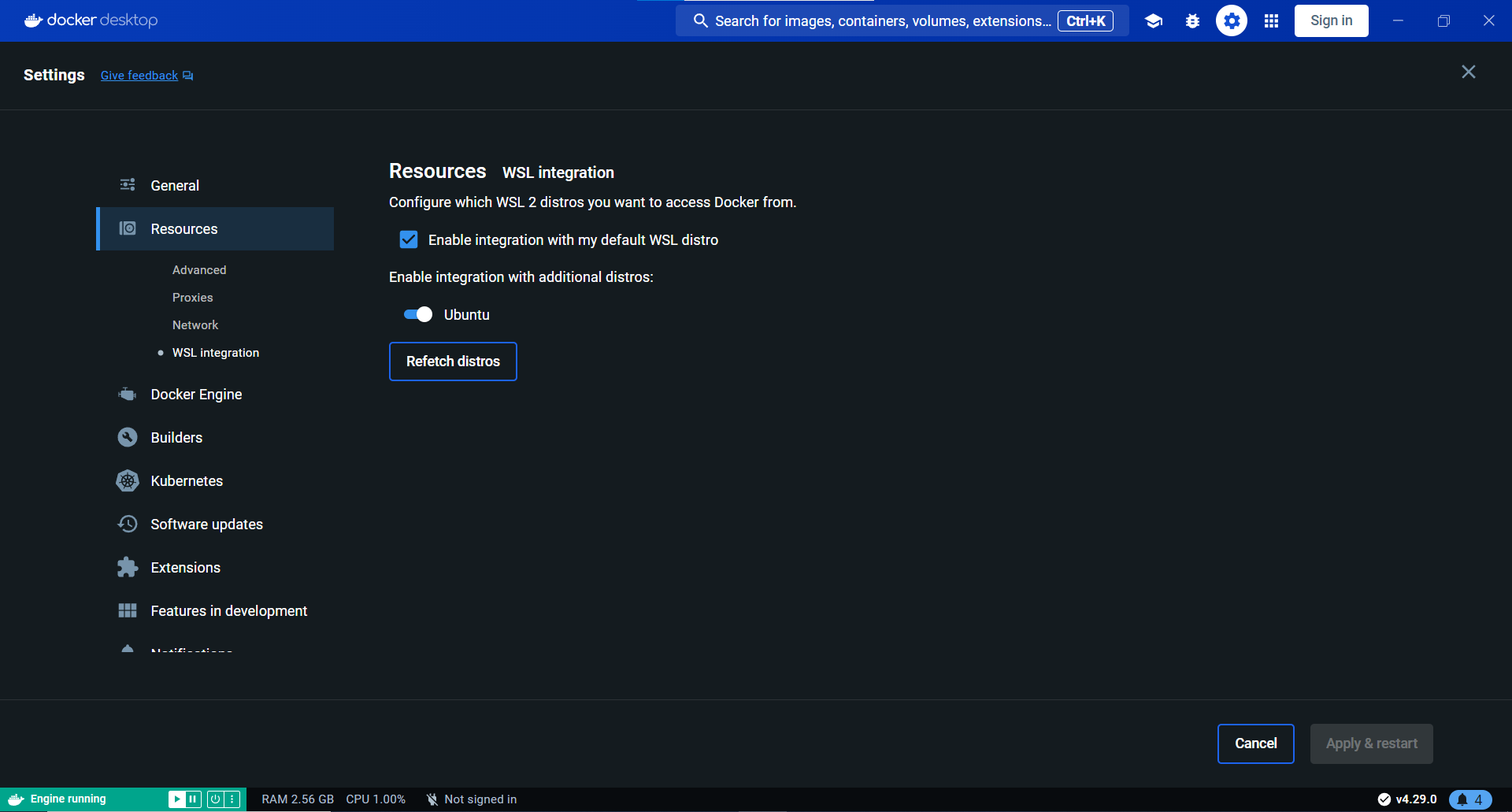
Enable Docker Desktop WSL integration: In order to wsl2 to recognise Docker, you need to enable it. For that, go to Docker Desktop -> Settings -> Resources -> WSL integration. Click on the check box and the slider.
-
Pull the current distribution of Bt Studio and of Bt Studio Database (currently version 0.8):
docker pull jderobot/bt-studio-database:latest
docker pull jderobot/bt-studio:latest
-
In order to obtain optimal performance, Docker should be using multiple CPU cores. In case of Docker for Mac or Docker for Windows, the VM should be assigned a greater number of cores.
-
It is recommended to use the latest image. However, older distributions of Bt Studio can be found here.
MacOs (NOT TESTED!)
- Remember to add minium docker version to run a Bt Studio.
2. How to launch a Bt Studio container?
- Launch databases
docker run --hostname my-postgres --name universe_db -d\
-e POSTGRES_DB=universe_db \
-e POSTGRES_USER=user-dev \
-e POSTGRES_PASSWORD=bt-studio-dev \
-e POSTGRES_PORT=5432 \
-d -p 5432:5432 \
jderobot/bt-studio-database:latest
- Start a new docker container of the image and keep it running in the background:
- The priority order is: NVIDIA -> Intel -> Only CPU
docker run --rm -it $(nvidia-smi >/dev/null 2>&1 && echo "--gpus all" || echo "") --device /dev/dri -p 6080:6080 -p 1108:1108 -p 7163:7163 -p 7164:7164 --link universe_db jderobot/bt-studio:latest
Advanced Instructions on Linux
-
NVIDIA: For NVIDIA GPUs, acceleration can be achieved by installing the nvidia-container-runtime package, and then running the auto command above.
-
Integrated GPU ```bash docker run –rm -it –device /dev/dri -p 6080:6080 -p 1108:1108 -p 7163:7163 -p 7164:7164 –link universe_db jderobot/bt-studio:latest
- **Only CPU:**
```bash
docker run --rm -it -p 6080:6080 -p 1108:1108 -p 7163:7163 -p 7164:7164 --link universe_db jderobot/bt-studio:latest
Windows
For Windows machines, acceleration can be achieved for NVIDIA GPUs if a valid CUDA installation is available. Useful docs for proper installation of WSL2 + CUDA + Docker Desktop:
Once these requirements are ready, you should be able to run Bt Studio with GPU acceleration as follows:
docker run --rm -it --gpus all -v /usr/lib/wsl:/usr/lib/wsl -e LD_LIBRARY_PATH=/usr/lib/wsl/lib --device /dev/dri -p 6080:6080 -p 1108:1108 -p 7163:7163 -p 7164:7164 --link academy_db jderobot/bt-studio:latest
Tips for Docker
Make sure to remove the container if you have problems with the exercise not loading with the following commands.
- Locate the docker container used for Bt Studio using
docker ps -a
- Remove that container using
docker rm CONTAINER_ID